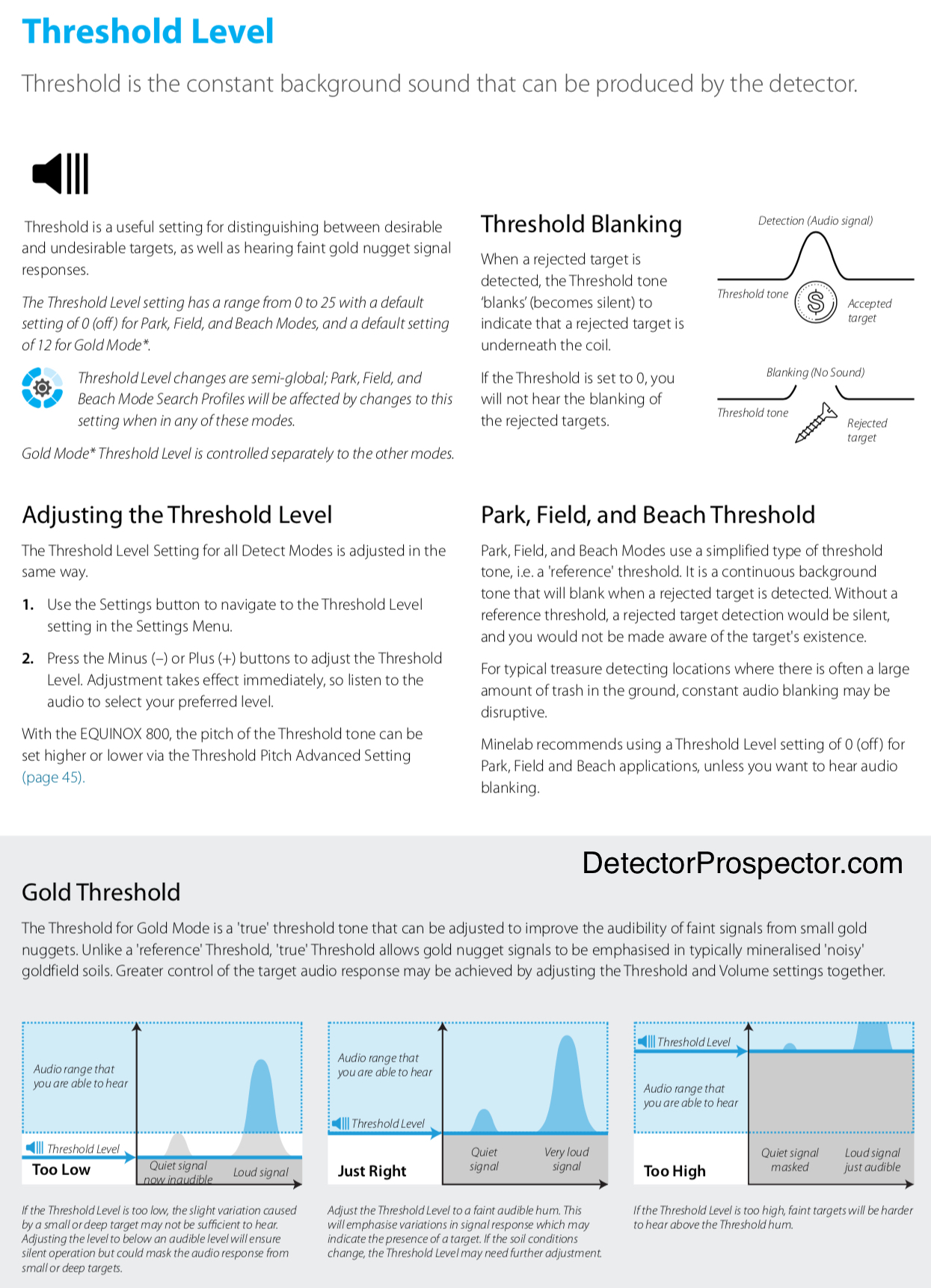
What is metal detector “autotune” or automatic tuning? Not automatic ground balancing or automatic ground tracking. Autotune is something so common now it is taken for granted, but it is a key feature when considering how detectors work, especially those designed to work with a faint threshold sound, like most nugget detectors.
Prior to the 1980's most detectors had to be ''tuned''. You held them at a fixed height over the ground and manipulated a ''tuner'' until you got a bare threshold sound. A very faint sound you could barely hear. An increase in this sound meant you had a target. You could hold the detector over the target when you found it, and the increase in sound held steady. When the detector was moved off the target, the sound went away. No motion was required to get a signal, and so this mode of detecting is referred to as the ''non-motion mode''.
There were two problems. First, the detectors of that day ''drifted''. The faint sound you set would either get louder or fainter. As the machines adjusted to temperature differences, or as the batteries ran down, the threshold changed. It did so rather rapidly, and so you constantly had to adjust the faint threshold setting manually to keep it on that vital edge.
Also, the machines of the day could not ground balance. So if you raised the coil you got a false signal. If you lowered it the detector ''detuned'' and the threshold went away. Faint targets were lost. This was mostly an issue with small depressions in the ground. If you had the detector tuned to a fine edge, going over even the slightest depression gave a false positive signal. What I did myself was hold the detector an inch over the ground, tune it, and then lower it to the ground. This slightly detuned the detector and gave up the fine edge, but eliminated false signals from small depressions in the ground.

Early 1970s "Mineral - Metal" ttuner control
The first solution to this issue was push-button retune. If the faint threshold you had set got too loud or went away for any reason you just pushed a button, and you went right back to the original threshold setting. It was a great advance in its day, as pushing a button was much easier than turning a knob to get back the correct threshold. The detector “remembered” where you set the threshold, and a push of the button instantly returned it to where you had previously set it. This also made for better pinpointing of targets, as you could get close to the target, hit the button to detune the detector, and then zero in on the sharpest signal. Some detectors today still feature this form of ''non-motion pinpointing''.
The next advance was electronic. The detector took note of the threshold you set, and circuits attempted to maintain the same threshold level. Since the original idea was to ''tune'' your detector, autotune was born. The detector automatically tuned the threshold. But a side effect was that if you held the detector steady over a target it was ''tuned out'', as the machine sought to return to the ideal threshold level. You had to keep the coil moving over the target to hear it, and so the “motion mode” was born.
The original Gold Bug is the best example of all this. It is a pure all metal circuit with absolutely no discrimination. If set in the ''No Motion'' mode you can hold the detector over a target and get a louder sound that does not fade away. The closer you are to the target, the louder the sound. Great for pinpointing. But if you set the Gold Bug in this mode, it drifts. The threshold sound tends to get louder and louder. A Retune button is provided to reset the Gold Bug to the original threshold sound as adjusted by the threshold control. You must hit it about once a minute.
The Gold Bug also has an ''Auto Tune'' mode. This is the mode you would normally use. The detector now reads the threshold setting in a feedback loop and keeps it steady. The side effect is that if a target is held steady under the coil, it is ''tuned out'' rapidly. The coil must be kept in motion over the target to get a signal, otherwise the autotune circuitry adjusts it out. It does not matter what causes the threshold to vary. The circuitry just attempts to keep it steady. Nothing is being tuned other than the threshold sound. Finally, there is a "Motion" mode, that is the same as the Auto Tune mode but with no threshold sound (silent search).

Fisher Gold Bug controls, with Auto Tune in lower left
The Gold Bug is an instructive model because discrimination is not part of the equation and you can see versions of all three basic detector modes at work. Threshold based non-motion mode, threshold based motion (autotune) mode, and silent search (no threshold) motion mode. Here is an excerpt from the Gold Bug manual that describes the three modes in more detail:
NO-MOTION MODE: This is the most difficult mode to use. It is more prone to false signals, requires more retuning and must be re-ground adjusted more often than the other modes. However, the search coil does not have to be in motion for target response so it's the preferred mode in tight spots or situations where you just can't keep the coil moving back and forth. Furthermore, the problems of tuning, ground adjust and false signals lessen considerably at lower sensitivity levels or in non-mineralized ground. The No-Motion mode is most often used however for precise pinpointing once a target has been located in one of the other modes.
MOTION MODE: In this mode the search coil must be moving, at least slightly, to detect a target. This is the easiest mode to use under moderate soil conditions. There is no threshold tone to worry about so you don't have to use the THRESHOLD control or listen to a constant hum. It's more sensitive than the Auto-Tune and doesn't require retuning like the No-Motion mode. On the other hand, the Motion mode is more sensitive to electrical interference and it's harder to identify false signals and bad targets (hot rocks, ground minerals, trash).
AUTO-TUNE MODE: Also a motion mode requiring at least slight coil movement. Target response is smoother than in the Motion mode and, with practice, it's easier to tell the difference between nuggets and hot rocks and there are fewer false ground signals. Since most nuggets are found among hot rocks in extremely mineralized soil this will be the mode of choice for many nugget hunters.
Various detectors were introduced with these features. What varied was the rate at which they autotuned. A slow autotune meant that the detector would not adjust as rapidly to variations in the threshold sound. The slow autotune had less of a tendency to ''tune out'' small targets or very deep targets. A fast autotune was more forgiving of variations in the way the detector was operated, in particular as regarding the distance of the coil over the ground and false signals, but is more prone to tuning out very small or very deep targets. Whatever autotune rate is chosen, it is a compromise. And what works well in one location does not work so well in another.
When nugget detecting became popular a new variable was introduced. Ground mineralization, and more importantly, variations in ground mineralization, was something coin hunters rarely had to deal with. It was something a nugget hunter commonly encountered.
Detectors at this time developed the ability to ground balance, or adjust out the ground effect that caused early detectors to give a false signal if the distance over the ground varied. Depth of detection dramatically increased. The ground balance control initially was a manual control, and so could be set for a certain ground condition. Any change in the ground mineralization tended to produce false signals.
Autotune once again came to the rescue, as evidenced by its use in the original Gold Bug model. Units with a slow autotune had fewer tendencies to tune out small gold nuggets, or very deep gold nuggets. The downside is they had to be operated very slowly to allow the autotune to keep up with ground variations. Units with a fast autotune could handle variations in the ground conditions better, but had more of a tendency to tune out small or deep targets. Overall depth was usually decreased with faster autotuning but ease of operation increased.
Another split in the technology came along. Many detectors, especially coin detectors, opted for a “silent search” mode. This mode eliminates the threshold sound entirely, very much like taking a detector with a threshold control and turning the threshold down until it cannot be heard. This makes for a quiet machine and became the preferred mode for many coin detectors. But it gives up a fine edge and so top performing units continued to offer a threshold control. Detectors that are silent search units do not need an autotune circuit.
You can test a detectors autotune rate on detectors that have a threshold setting by holding a coin under the coil, and noting how fast the threshold adjusts back to its original level. This can vary from a couple seconds to almost an almost instant adjustment.
An interesting side effect of autotune is ''overshoot''. If the detector is swept to one side and encounters a target, it attempts to ''tune into'' the target. If the target is a ''positive'' target, in other words the threshold increases, then the autotune circuitry immediately reads the increase and attempts to adjust lower. As the coil passes the target, there is a brief moment of silence as the autotune now has to turn around and increase the threshold back to its original level.
In practice, you normally do not hear this. You hear the increase in tone, but not the decrease that follows. The target goes ''beep-beep'' as you swing back and forth over it. The ''beep'' is centered over the target. Move the coin back and forth under the coil and you will hear the sound. Now hold the coin under the coil until the threshold steadies, then remove the coin. The machine will go silent for a short period, again depending on how fast the autotune circuit is.
However, if the target is an iron mineralized rock, most commonly a rock with a high magnetite content, then the threshold ''detunes''. The threshold is reduced and goes silent. So as you pass over the hot rock the threshold sound goes silent. The autotune circuit attempts to adjust by raising the threshold sound. But at this point you have passed over the ''negative'' target. A distinctive ''boing'' sound results since the threshold sound is now too high, and the autotune immediately attempts to adjust back down. The ''boing'' sounds occur to each side of the target as you sweep back and forth over it. The quiet spot, or ''null'' at the point between the opposing boings indicates the actual location of the target.
To reiterate, autotune creates two types of signals. A beep-beep signal with the beep centered as the coil sweeps over it in both directions. Or a boing-boing signal, with the apparent target dancing back and forth as the coil sweeps over it. The null between the two boings is the actual location of the target, usually a hot rock.
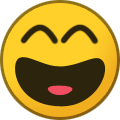
When White's introduced the Goldmaster V/SAT it featured "Variable Self Adjusting Threshold" or V/SAT. Self Adjusting Threshold is White's term for autotune. It is a more appropriate term as it explains what is really happening. People tend to confuse autotune with automatic ground balance. Unfortunately, White's fondness for acronyms is such that most people do not know what SAT or V/SAT stands for. The latest acronym is iSAT by Nokta/Makro for "Intelligent Self Adjusting Threshold".

White's GMT Variable SAT Control
The Goldmasters for many years were the only nugget detectors that allowed you to vary the rate at which the threshold readjusts itself via a knob - anything from very fast to very slow. Only recently has this control become available from other manufacturers. It allows for more control in varying situations. In general, use the lowest SAT setting that allows for smooth operation. As ground variations increase, setting a higher self adjusting threshold can be beneficial. At low settings, the coil can be swept slower. High settings demand a faster sweep rate or the circuit will tune out signals as fast as they are created.
The Gold Bug 2 has a “High”, “Normal”, and “Low” mineral modes. These are actually three preset autotune adjustments, with Low being the slow autotune and High being the fastest. Normal of course is in the middle.
With the vast majority of the nugget detectors you have no ability to vary the autotune rate. A few programmable coin detectors offer the adjustment but usually relate it more to sweep speed so the detectors can be set for a slow sweep speed or a fast sweep speed.
To sum up, it is very important to know how fast your detector is autotuning. If it has a fast autotune and you move the coil too slowly, you will lose very small and very deep targets as the machine tunes out the faint signal before you hear it. Conversely, if your detector has a very slow autotune rate (rare these days, but common on old detectors like the Compass Gold Scanners) then moving the coil too quickly will also cause very small or very deep targets to be lost.
The best way to observe this is to bury a target, and sweep the coil over it. Go real slow, go real fast, and try something in between. You will find a certain speed will produce the loudest and sharpest signal. Going much faster or much slower will muffle the target. Detector engineers try to shoot for a normal sweep speed, and newer detectors are much more forgiving than older units. But sweep speed does impact the performance on many detectors. One thing that sets the pro apart from the novice is that the pro keeps the coil moving at the optimum rate that produces the best signal. When autotune is combined with auto ground tracking, this awareness of optimum sweep speed is even more critical.
As a rule single frequency machine can handle faster sweep speeds. Multi-frequency and pulse induction (PI) detectors benefit from slower sweep speeds. People used to one type of detector often have a hard time adjusting. It is very common for operators of single frequency fast sweep detectors to swing PI detectors far faster than they should, resulting in significant lost performance. Do not be one of those people. Experiment with your detector to find the optimum sweep speed, and in the case of the few machines that allow for adjustments, experiment to see how slower and faster settings affect the performance. It can make all the difference between finding that gold nugget and missing it.
~ Steve Herschbach
Copyright © 2010 Herschbach Enterprises
-
 7
7
-
 1
1
-
 1
1