Alex_Sor
-
Posts
27 -
Joined
-
Last visited
Content Type
Forums
Detector Prospector Home
Detector Database
Downloads
Everything posted by Alex_Sor
-
Basics Of Ground Penetrating Radar
Alex_Sor replied to Alex_Sor's topic in Detector Prospector Forum
The situation in the Ukrainian economy is very bad now. Zelensky even before the war was "famous" for his failed decisions in terms of economic development, but what is happening now will be the final collapse ... Because of the war, I lost my business in Ukraine, if you want to help me and my family, my Paypal is: Alex.Sor.2022@gmail.com -
Basics Of Ground Penetrating Radar
Alex_Sor replied to Alex_Sor's topic in Detector Prospector Forum
The total combat losses of the enemy from 24.02 to 12.06 were approximately: Operational information as of 06.00 on 12.06.2022 regarding the Russian invasion The one hundred and ninth era of the Ukrainian nation’s heroic confrontation with the Russian military invasion has begun. In the Volyn and Polissya directions, the enemy did not take active action. In the border areas of the Republic of Belarus, additional measures are being taken for the engineering equipment of checkpoints and the deployment of additional means of electronic warfare. In the northern direction, the enemy continues to provide enhanced protection of the Ukrainian-Russian border in the Bryansk and Kursk regions. Increased levels of terrorist threat continued in Belgorod and Kursk oblasts. The enemy continues to fire mortars at the positions of the Defense Forces in the border areas. In addition, the aggressor fired on civilian infrastructure in the areas of Rozhkovichi, Gremyach, Luhivka and Popivka. The situation in the Kharkiv direction has not changed significantly. To restrain the actions of the defense forces, it exerts systematic fire on the positions of our units. In addition, the enemy fired on civilian infrastructure near Vernopil, Ukrainka, Petrivka, Chepil and Khrestyshche. He struck an air strike near the village of Mospanovo. In the Slavic direction, the enemy carried out systematic artillery shelling in the areas of the settlements of Petrivske, Nova Husarivka, Kurulka, Dolyna. He is trying to gain a foothold in the village of Bogorodichne, the fighting continues. The enemy did not take active action in the Lyman direction. Increased the intensity of artillery use, including multiple rocket launchers, in the areas of Shipylivka and Dronivka. Conducts regrouping of troops. In Severodonetsk, the occupiers are conducting assaults in the city of Severodonetsk, to no avail. Fighting continues in the Toshkivka area. In the Bakhmut direction, the enemy fired at our positions with mortars, barrel and jet artillery in the areas of the settlements of Komyshuvakha, Gorske, Mykolaivka, Belogorivka, and Novoluhanske. Enemy army aircraft struck near Pokrovsky. Ukrainian soldiers repulsed the offensive near the village of Vrubivka. The enemy also tried to advance in the direction of the settlement of Nikolaevka. He received a decisive rebuff and left. Our defenders also successfully repulsed the enemy assault in the Vasylivka area. The Russian occupiers suffered losses and retreated to their former positions. The enemy did not conduct active hostilities in the Avdiivka, Kurakhiv, Novopavliv and Zaporizhzhya areas. He insidiously fired on civilian infrastructure in the areas of Zhelanne, Avdiivka, Karlivka, Vuhledar and Orikhiv. Deploys additional units in some areas. In the South Bug direction, the enemy defended, firing at units of our troops with artillery, mortars and multiple rocket launchers. He tried to fight the battery. The Russian occupiers cynically shelled the settlements of Tverdomedovo, Berezneguvate, Kobzartsi, Kvitneve and Luch. Over the past 24 hours, the enemy has lost ten tanks, sixteen armored combat vehicles, seven UAVs, more than ten vehicles and up to 150 manpower. We believe in the Armed Forces of Ukraine! Let's win together! Glory to Ukraine! -
Gold Mining Underwater, Offshore
Alex_Sor replied to Alex_Sor's topic in Gold Panning, Sluicing, Dredging, Drywashing, Etc
Remote control will devalue (kill) the whole idea. Remote control implies the presence of a ship on the surface of the sea, a long cable. In case of excitement and storm, the ship will not be able to work, because it will not be able to stay in one place. Only an underwater manned vehicle for 1-2 people with air and electricity autonomy for 2-3 days makes sense. No windows, just TV cameras. In fact, this is an underwater excavator + dredge in one device. Turbidity and sludge will not interfere with operation if the cameras are at the end of the loader bucket. Minimum automation of left-right movement for suction is pulled. I thought of everything for a long time 🙂 -
Gold mining underwater, offshore I have a dream 🙂 I want to build an underwater vehicle for gold mining (washing) underwater, in the coastal area of Alaska and other places. Background: I am a former Submarine Engineer, mechanical and electrical specialist (+ electronics). I really liked the series on the Discovery Channel, about how gold is mined from the bottom of the sea in Nome (Alaska). I am impressed with the courage of these people. But ... I see that already now they have problems with mining gold from a depth of more than 5 meters. The shelf area (underwater part) extends much further than those small areas that are now being developed near Nome. To work in bad weather on the surface of the sea, and not to depend on it, you need to have an underwater manned vehicle on a caterpillar track, with a dredge and a flushing chute. This will allow you to work autonomously, for several days underwater, mining gold. In my opinion (thoughts) it should be a submarine with tracked engines, ballast tanks, which can independently float on the sea surface and sink to the bottom for work. I can design, calculate, and build this. I need money for this, and a few assistants who can work with their hands 🙂 Extraction of gold and minerals from the bottom of the sea is my old dream ... And I know how to make a submarine without spending millions of dollars 🙂
-
Basics Of Ground Penetrating Radar
Alex_Sor replied to Alex_Sor's topic in Detector Prospector Forum
-
Basics Of Ground Penetrating Radar
Alex_Sor replied to Alex_Sor's topic in Detector Prospector Forum
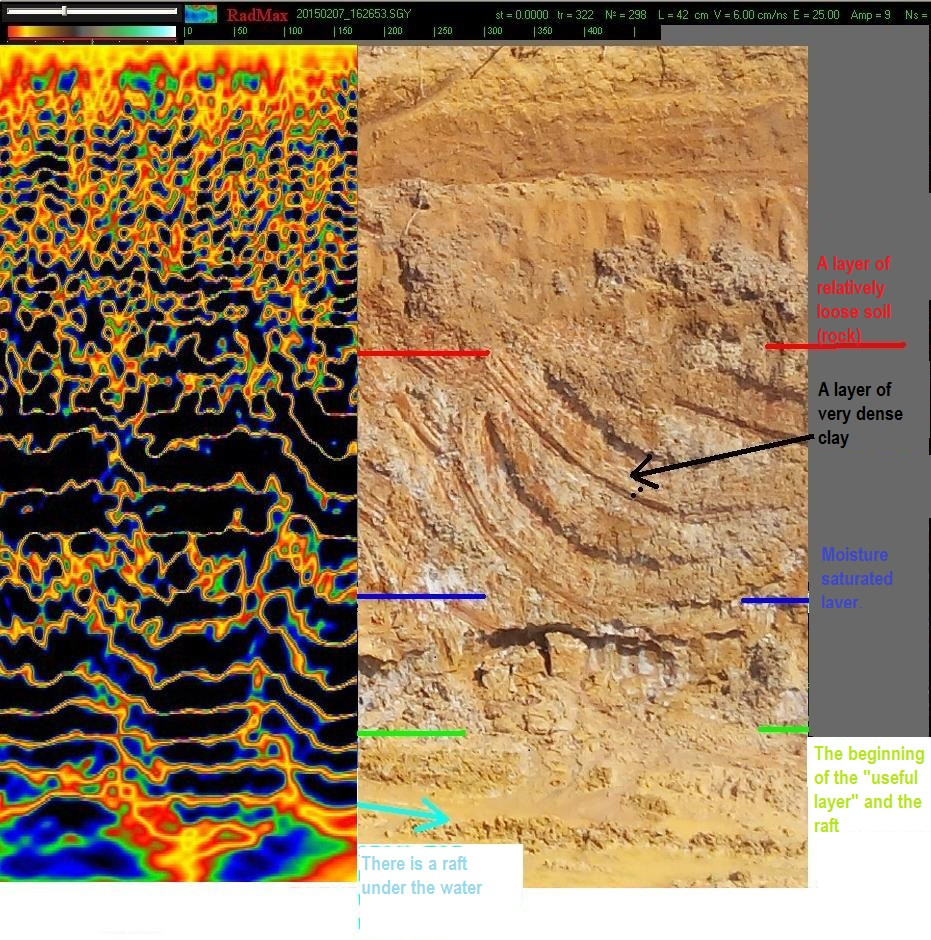
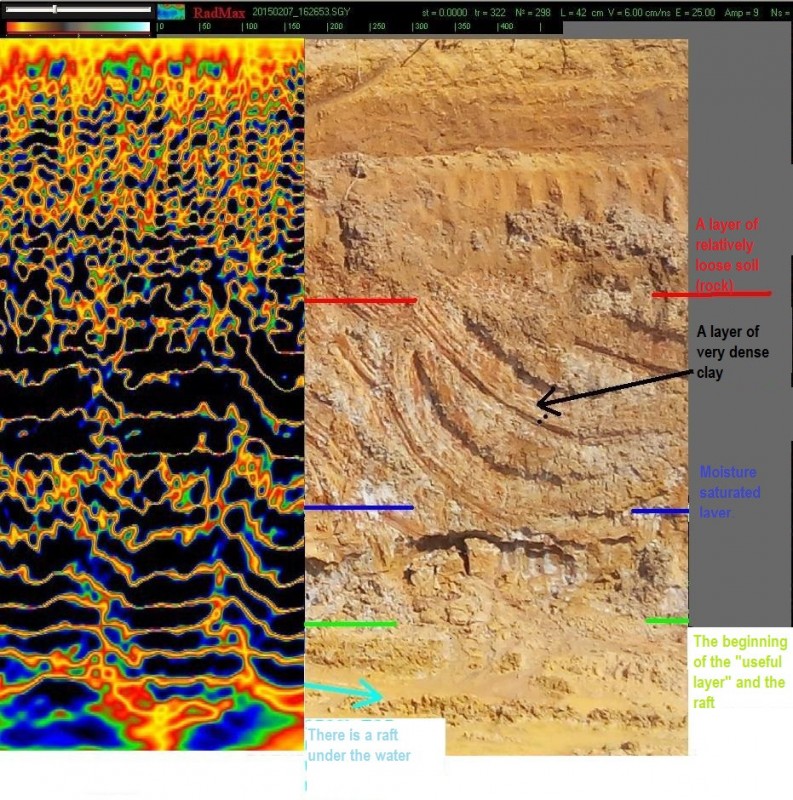
We found some data on Republic of Ghana (Africa) An expedition to search for gold placers worked there in 2014. They were looking for the channels of ancient rivers in order to check the placers of metals. Unfortunately, we were not given the primary files of georadar surveys, we received only a part of the reports ... The reports were verified during the expedition by excavator digging. The shooting depth actually reached 12-14 meters. A radar with a frequency of 300 MHz was used. I will give below what we have. 1) the test object buried in the soil of Ghana looks like this: The soil is mineralized and "rings" around the object. 2) This is how a layer of pebbles (boulders of different sizes from granite) looks like on the radar screen. 3) this is what a raft looks like with splashes of metal. You see numerous V-shaped and inverted V marks at the bottom (deep). 4) here is the combined frame: on the left is what the radar shows, and on the right is the result of a hole cut by an excavator.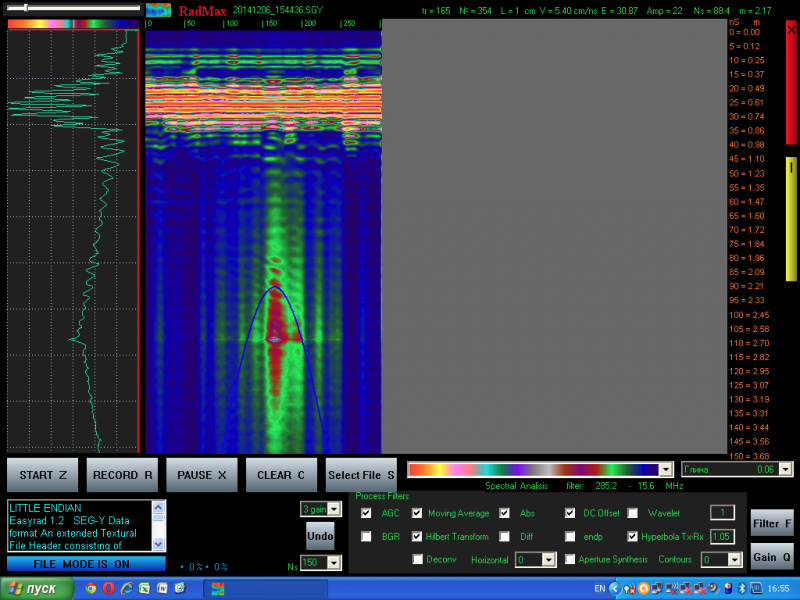
-
Basics Of Ground Penetrating Radar
Alex_Sor replied to Alex_Sor's topic in Detector Prospector Forum
Dear sirs 🙂 1) dry salty (even just salt itself) soils break through well (low attenuation). Any crystalline rocks break through well, we can talk about 5-15 meters of depth. Wet (wet) salt rocks are electrolyte (like seawater) and have a very high attenuation. 2) America (USA) has made it almost impossible to visit with tourist visas, all of us (who live in the former USSR, Ukraine) are considered criminals and deceivers 🙂 who will come and stay to live illegally in the USA. If someone took responsibility and made an invitation to one of us, we could bring a radar and travel (visit) places (fields) for measurements. 3) The cost of a radar complete with all antennas is about $8000. You could chip in money (put together money from several people) and buy one radar for several people, we could send you a radar and support you remotely. 4) Gold mining means you spend hundreds of thousands of dollars on digging and flushing equipment. If you do not have equipment for deep exploration (for example, georadar), then you will spend tens of thousands of dollars on fuel and blindly washing tons of rock, playing roulette - "lucky or unlucky." In Ukraine, many amber seekers have georadars, despite the fact that we are a poor country and for such a sum of money you can buy a house in a village in Ukraine 🙂 -
Basics Of Ground Penetrating Radar
Alex_Sor replied to Alex_Sor's topic in Detector Prospector Forum
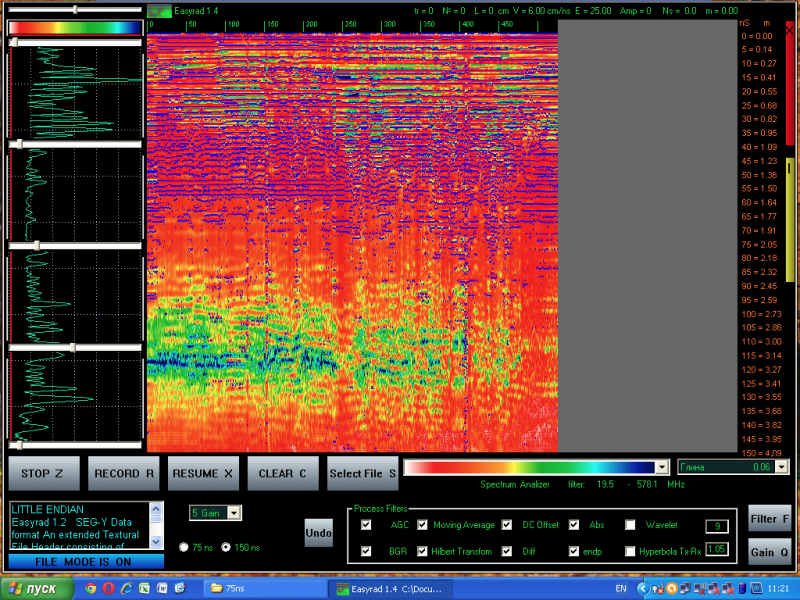
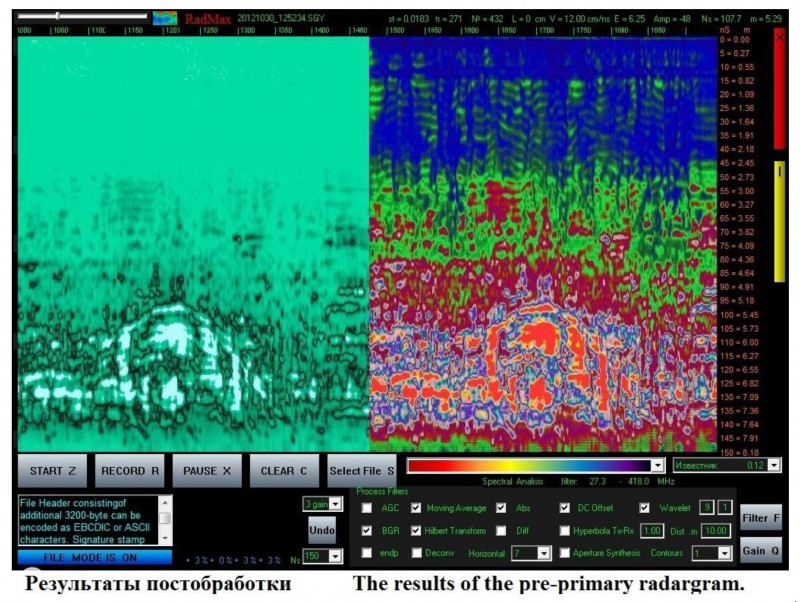
test in the forest. EasyRad GPR Pro GPR + RadMax software -
Basics Of Ground Penetrating Radar
Alex_Sor replied to Alex_Sor's topic in Detector Prospector Forum
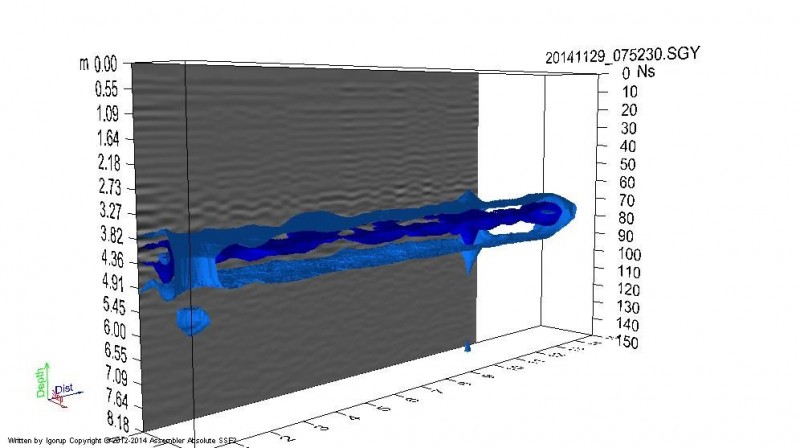
Underground pipeline. 3D processing of measurements of several profiles, processing in the RadMax program. ( pipeline length = 34 meters )
-
Basics Of Ground Penetrating Radar
Alex_Sor replied to Alex_Sor's topic in Detector Prospector Forum
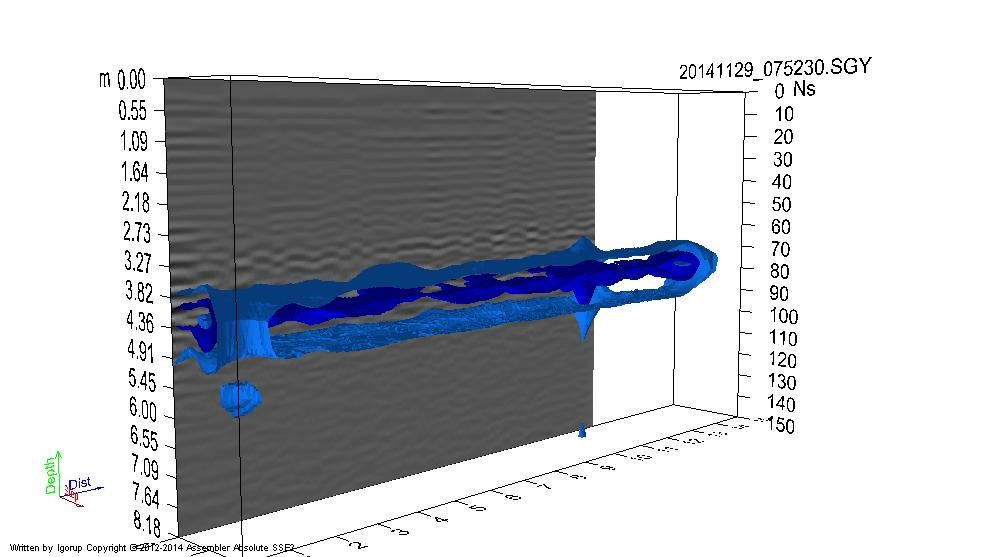
3D processing of measurements river bed from several profiles, processing in the RadMax program.
-
Basics Of Ground Penetrating Radar
Alex_Sor replied to Alex_Sor's topic in Detector Prospector Forum
this is how the real riverbed looks like under water Advanced processing is applied here. Measurements were made across the river bed!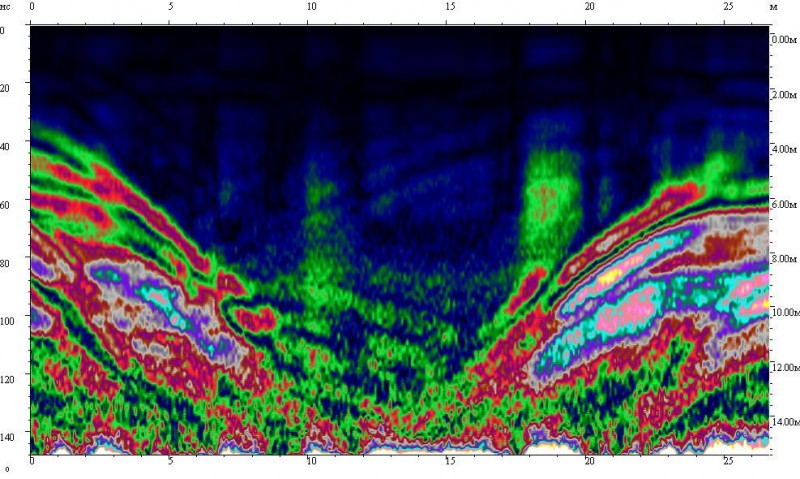
-
Basics Of Ground Penetrating Radar
Alex_Sor replied to Alex_Sor's topic in Detector Prospector Forum
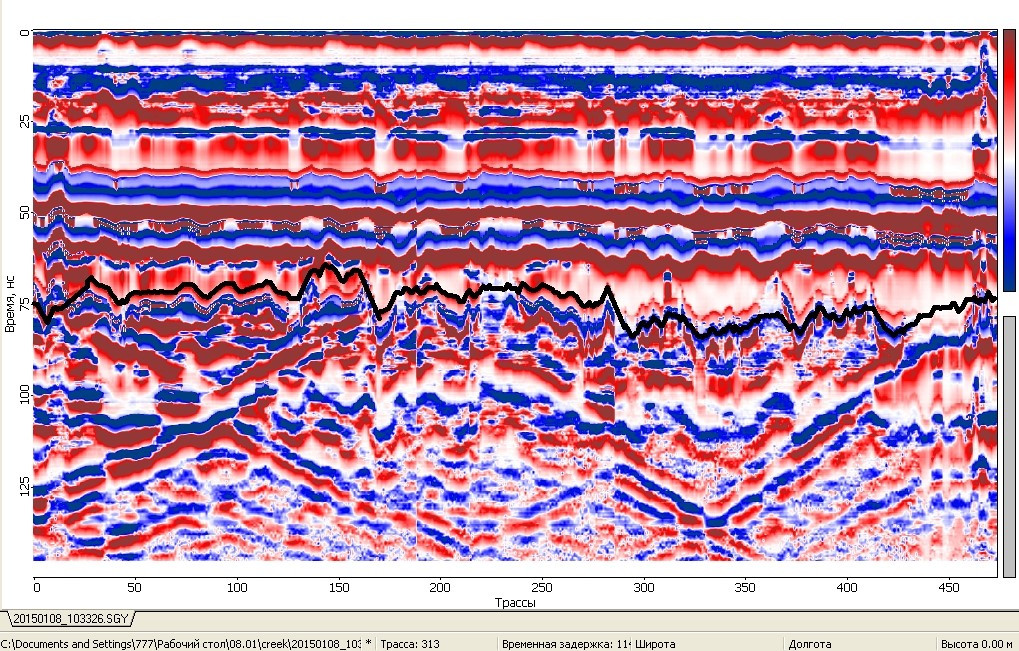
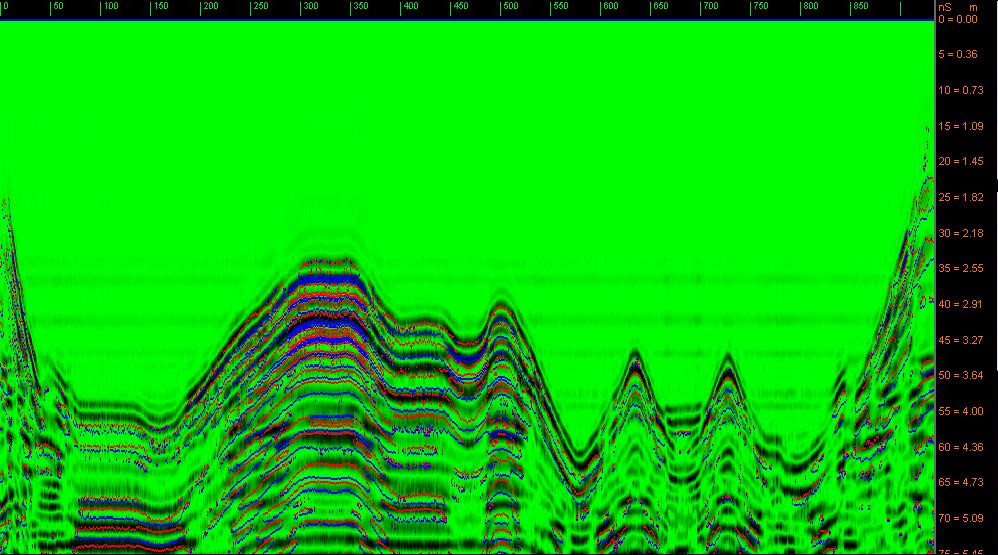
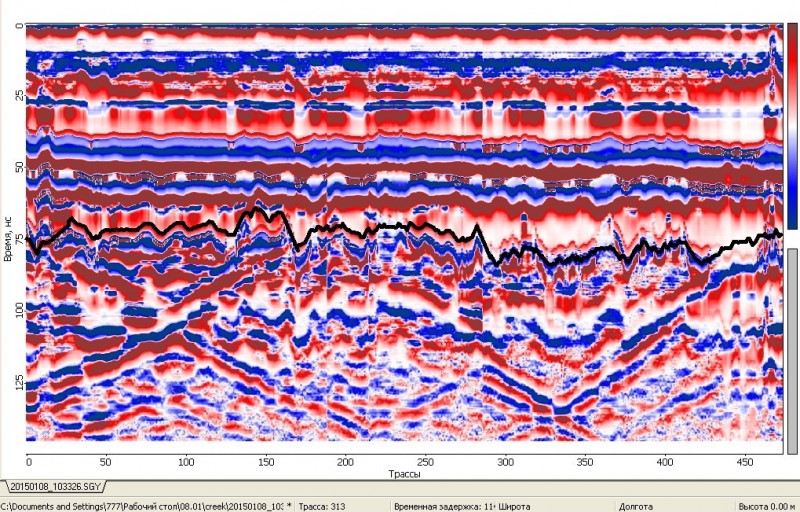
Winter work through the ice. This is a picture of a real bed of an old river, under a layer of ice. (Ice is radio-transparent) Now there is a swamp in that place, but we were looking for the old river bed. the first channel of river - on the green scale (top of the image) 50-200, the second channel of river= 650-800. Measurements were made across the river bed!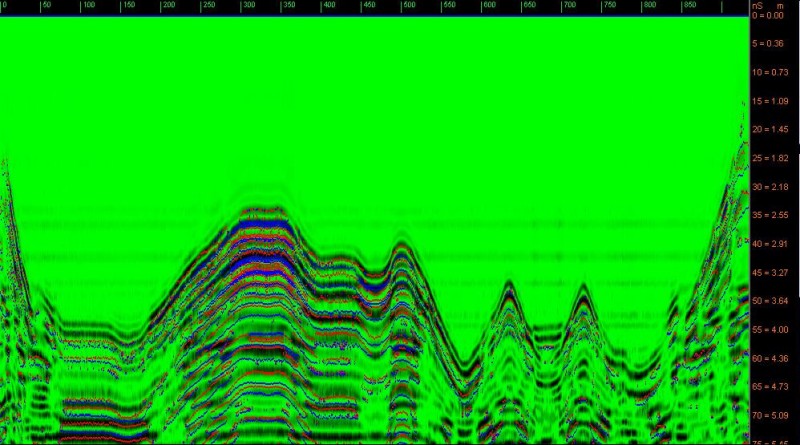
-
Basics Of Ground Penetrating Radar
Alex_Sor replied to Alex_Sor's topic in Detector Prospector Forum
Amber. Real filming and real processing is in this video. Set in the settings "show subtitles" and "translate into English". ( from 13:40 time ) And here is a photo of part of what we managed to lift from the depth ...
-
Basics Of Ground Penetrating Radar
Alex_Sor replied to Alex_Sor's topic in Detector Prospector Forum
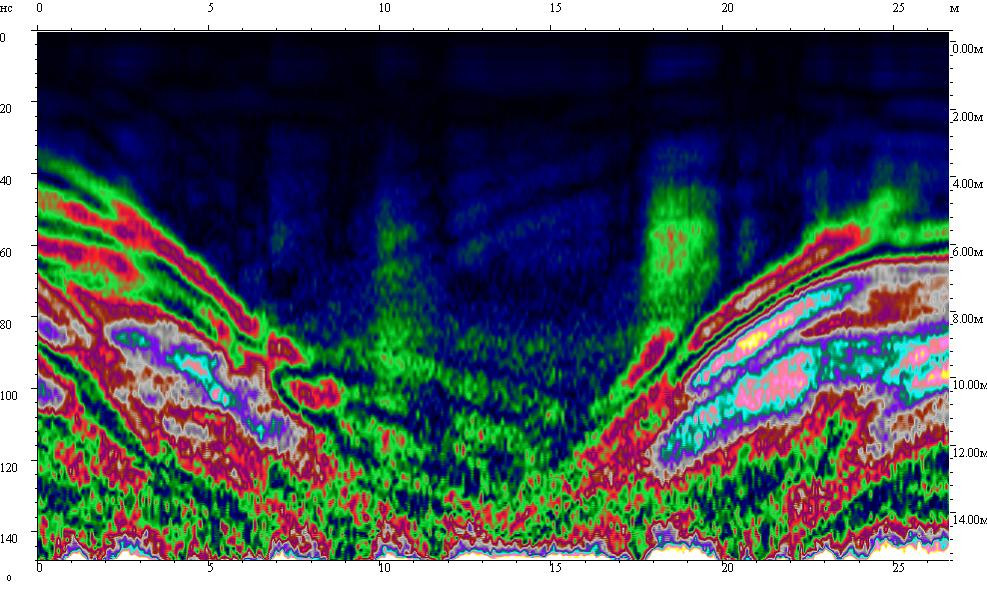
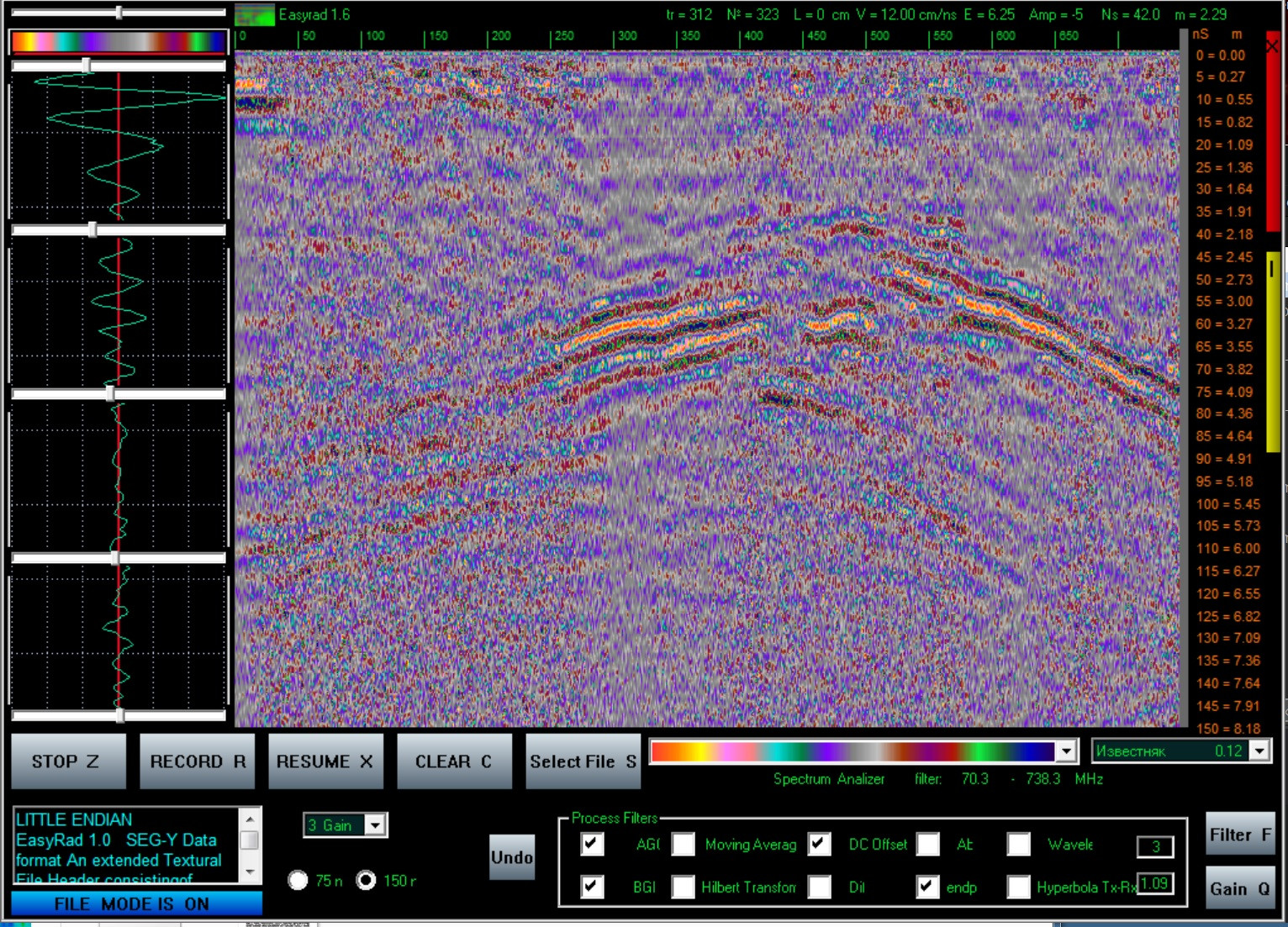
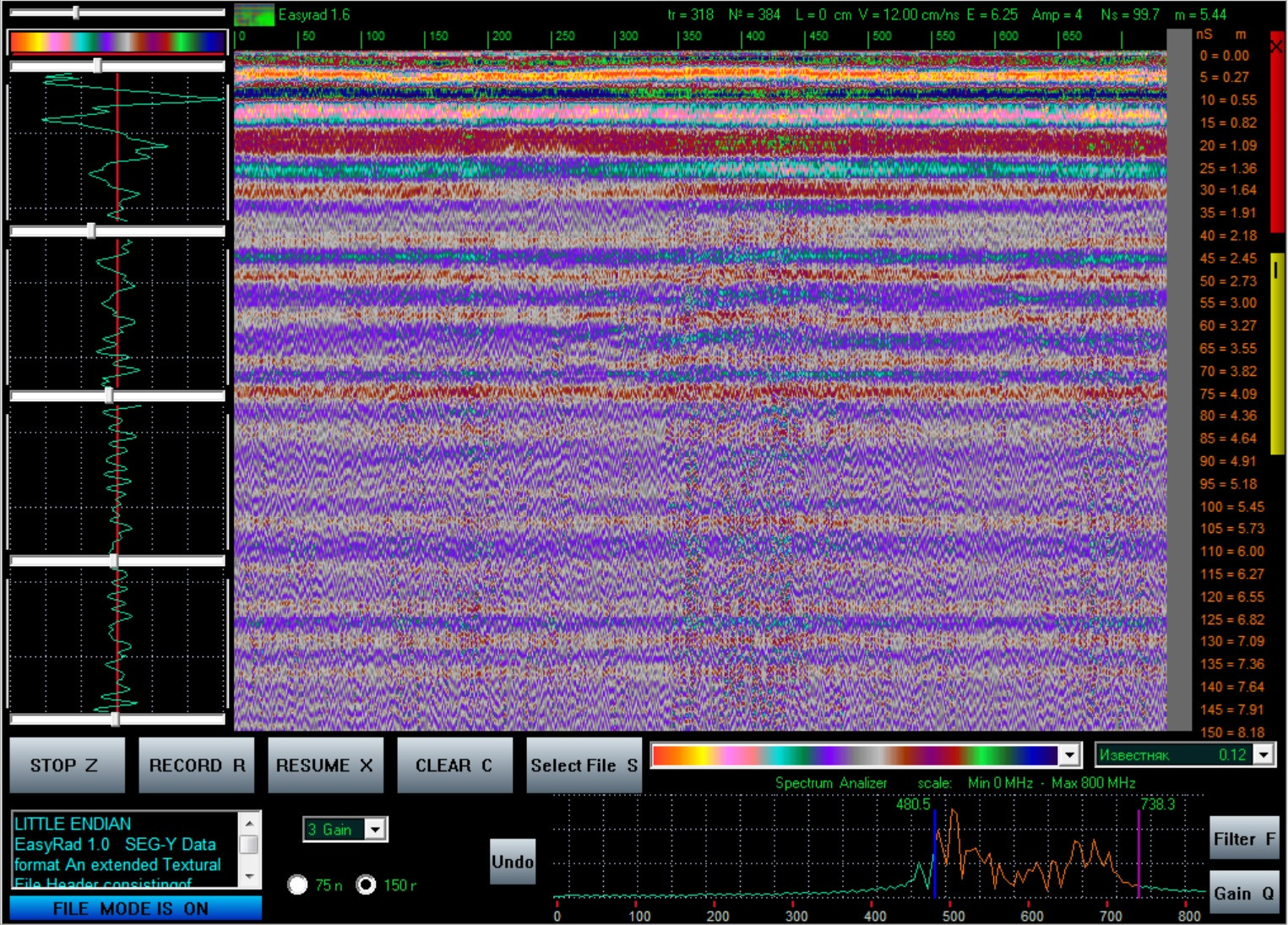
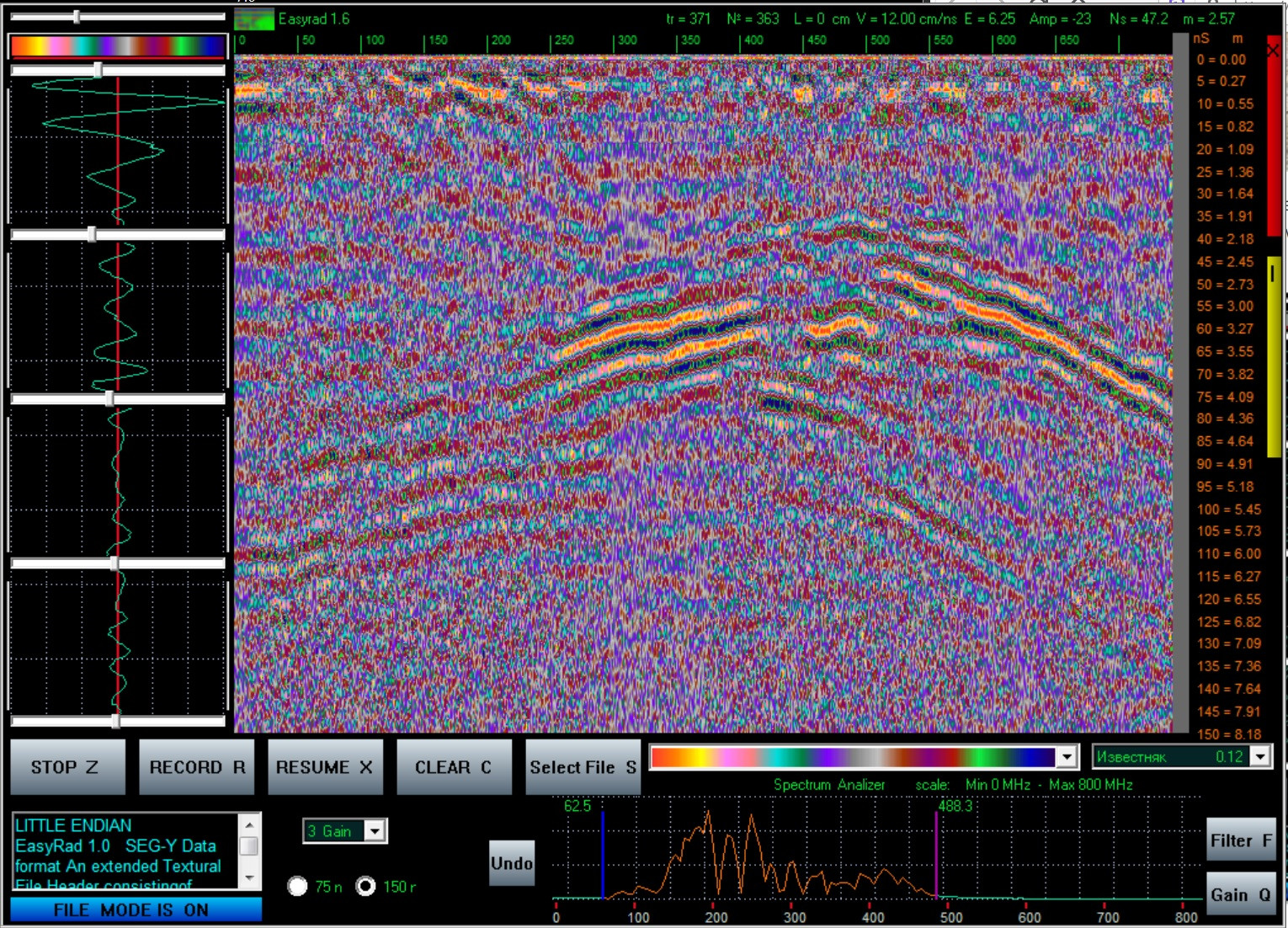
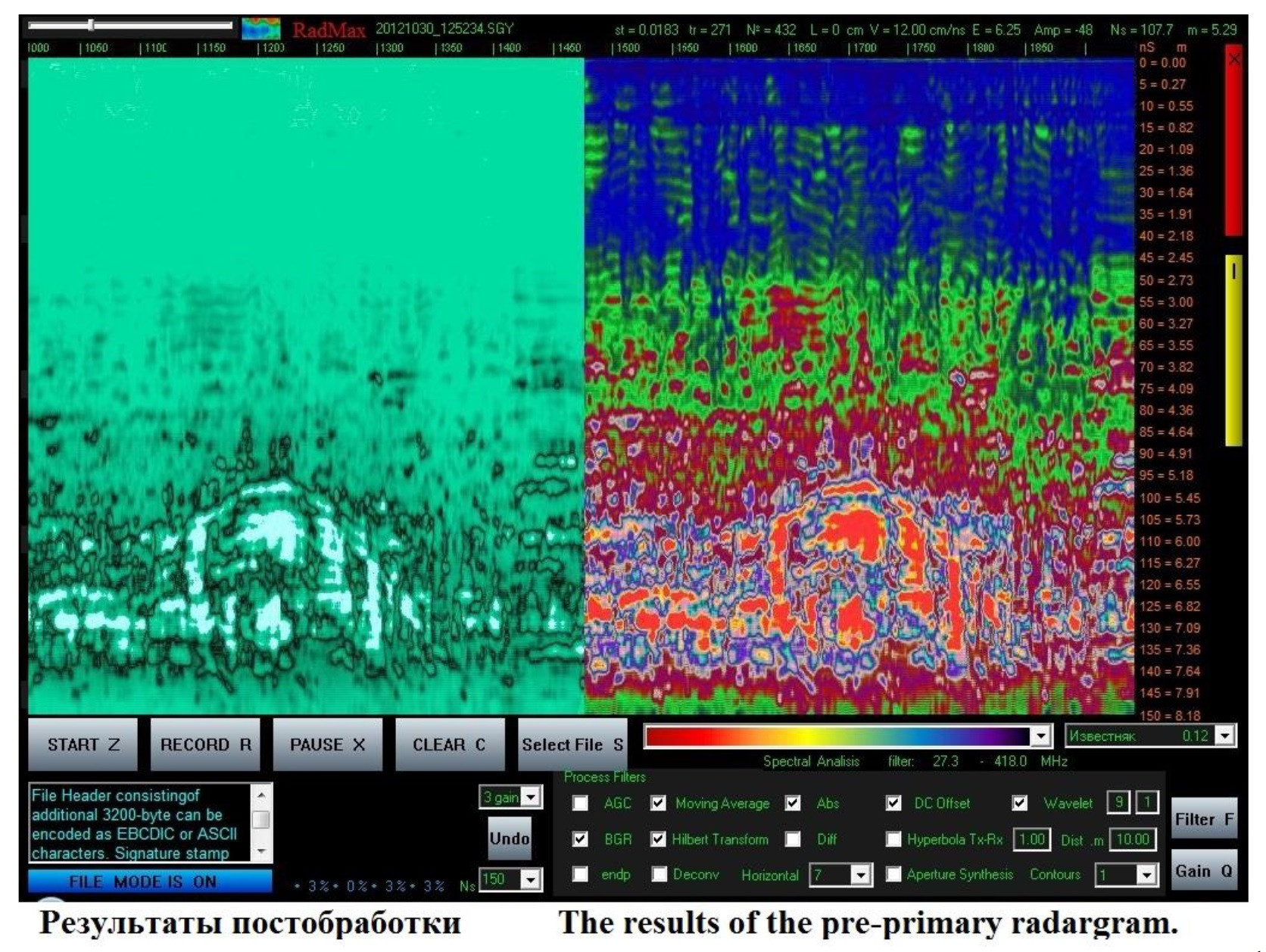
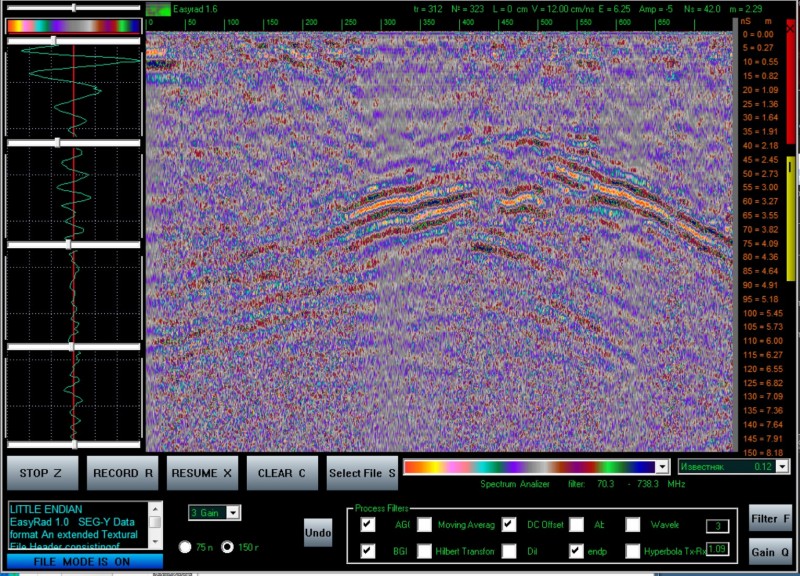
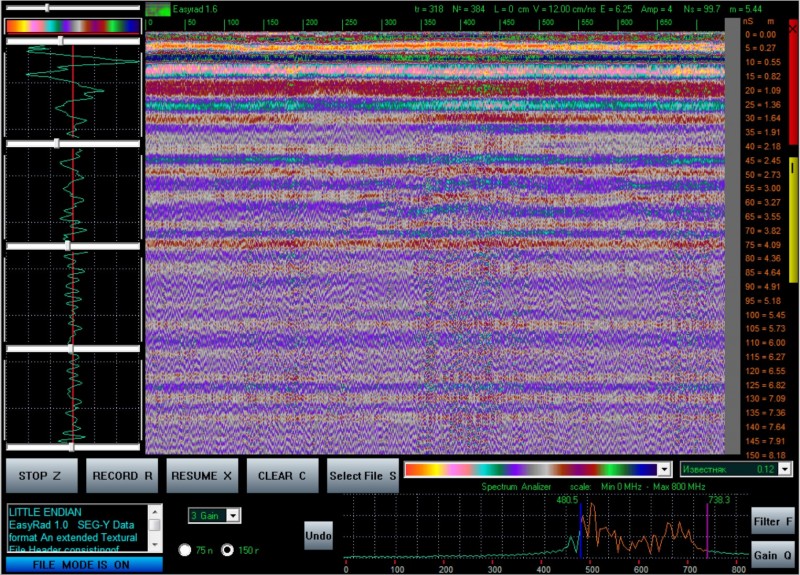
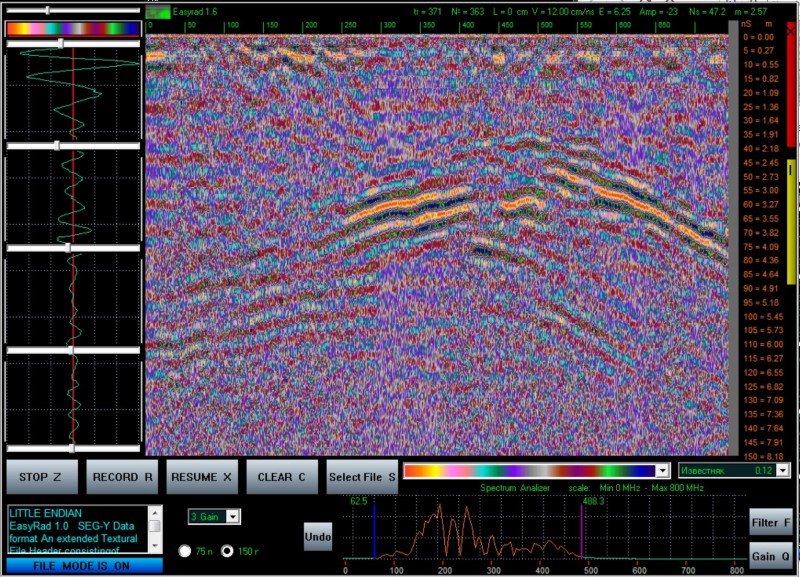
I can say, that several times I was invited to a company that was engaged in checking the ancient city of the times "Kiev Rus" (Ukraine) (about 1200 AD). So, I checked the rest of the protective rampart around the city (what was left of it). It was mostly clay (not wet), gray-yellow in color, and I was able to find remnants of burnt (fire and carbon-soot) bricks. They were at a depth of about 1 meter from the surface, metal detectors showed nothing (we had Lorenz with a 2.5 meter antenna carried by two people). I was interested in the picture on the radar, and I reported that under us there may be hundreds of stoves, where there could be something interesting. We dug the object, and indeed there were burnt and covered with twisted soot stones. Small metal objects are visible during post-processing of the radar profile (when you are in no hurry and can play a lot with display palettes). In my experience, approximately 30% of objects are in real-time when they pass in the field (field shooting). The rest 70% can be detected during post-processing, when there is time for many profile runs in a processing program with different mathematical filters. For example, an object near the city of Kaliningrad. (former Germany). In this place, there was a suspicion of an underground bunker, in which there were some objects. We managed to shoot. Filming (see the profile picture) showed the presence of an underground cavity with some boxes inside of which objects have a chaotic orientation. It is visible as "ripples up" above the boxes. See the picture. Pay attention to the area (picture above) 300-450 (green numbers at the top of the scale). This is a screenshot from the georadar screen, Easyrad program. I have a "source file" of the footage and can play with it using different palettes and filters. If I apply other filters, and cut the frequencies of the rad to high (cut off the low frequencies, i.e. leave only the return of frequencies from small objects), then I will get this picture: Pay attention: it was the reflections of a higher frequency (from 480MHz to 800MHz) that appeared here and the "ripples" created by multiple reflections became more distinct. If we leave only low frequencies (80-500 MHz), then we will more clearly see the bunker itself and something big in it (300-450 in green numbers): Unfortunately, the bunker had a "secret", when trying to excavate the bunker, the excavator damaged the waterproofing, and the bunker was flooded with water ... Unfortunately, the fate of the object is currently unknown. Due to the outbreak of the 2014 war.

-
Basics Of Ground Penetrating Radar
Alex_Sor replied to Alex_Sor's topic in Detector Prospector Forum
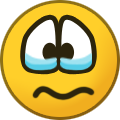
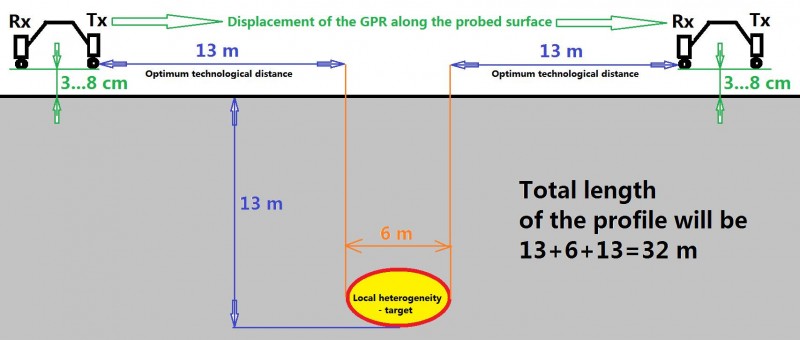
The probing signal emitted by the GRLPZ antenna propagates under the earth's surface, attenuating as it propagates, and, encountering an inhomogeneity, is partially reflected in different directions, including in the direction of the receiving antenna. The level of the received signals depends on the reflection coefficient of the signal from the subsurface inhomogeneity. The reflection coefficient depends on how much the electrical parameters of the inhomogeneities differ from the parameters of the environment. The larger the difference, the larger the reflected signal. Part of the signal travels further and is reflected from the next discontinuity, etc., until the signal is completely attenuated. The table below shows the electrical characteristics, radio propagation velocity and attenuation coefficient of the media most commonly encountered in practice. Table: Physical properties of natural environments: As you can see from the table, (the last column of the table) Ice and Granite can be equally transparent to radar. The most transparent is "dry sand" and "distill water". Georadar specifications: Maximum sounding depth (at a frequency of 100 MHz), = 24meters Resolution in the vertical direction, = <10 centimeters Resolution in the horizontal direction, = <10 centimeters Error in the analysis of electrical constants and the speed of propagation of radio waves in the ground, =% 15-20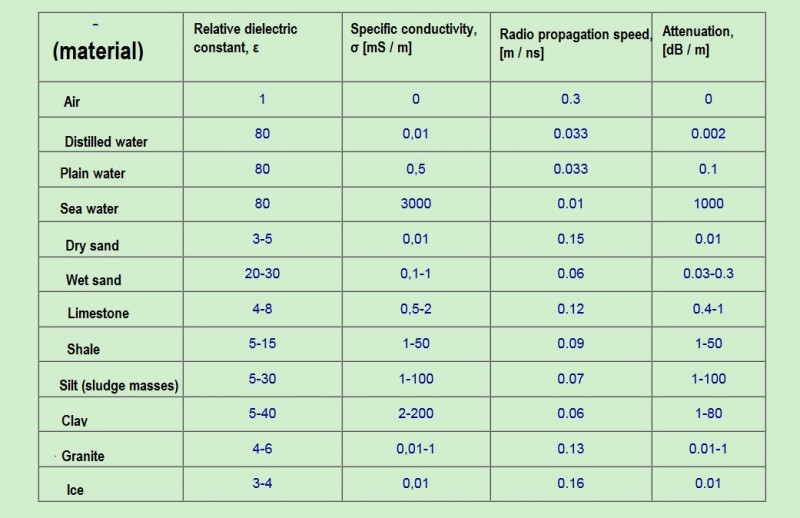
-
Basics Of Ground Penetrating Radar
Alex_Sor replied to Alex_Sor's topic in Detector Prospector Forum
I think I need to find suitable pictures and profiles in my archives. Unfortunately, you and I have a big difference in time (in Ukraine it is closer to the night now), I will prepare and answer you most likely tomorrow morning (Kiev time, Ukraine). I can say now that if there are no wet clays and strong wet mineralization in your area) the search zone, then the radar will be able to view to a depth of 10-15 meters (depending on the breed). Rocks are more radio-permeable. Granite is radio-transparent, granite boulders (pebbles) under a layer of sedimentary rocks look like "decompaction zones" (zones with a low density of matter) and are clearly visible on the GPR profile. If we are talking about depths of 2-5 meters, then even in wet clays we can talk about the possibility of searching for a placer of nuggets, if the sizes of objects are not "fine dust". I understand that these are just my words, I will try to find examples and lay out pictures for you of how it looks in reality on the radar screen. -
Basics Of Ground Penetrating Radar
Alex_Sor replied to Alex_Sor's topic in Detector Prospector Forum
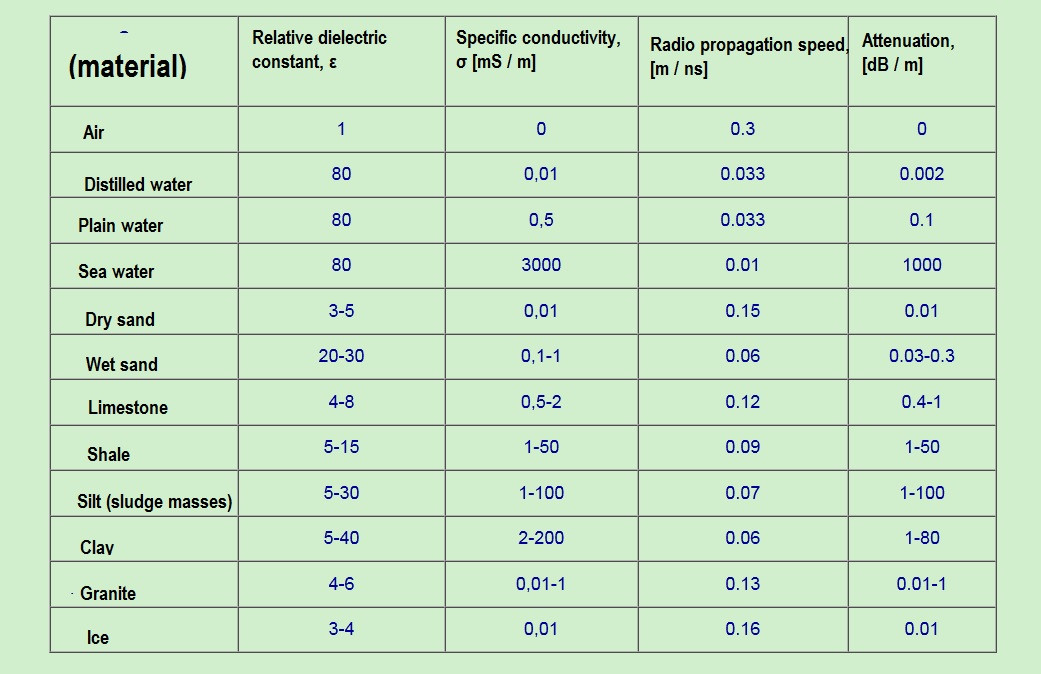
Practical example. there are amber deposits in Ukraine. Amber accumulates near the bends of river beds that flowed millions of years ago. Now it is a great depth. How to look for something that is not metal? Georadar can help with this. Here is a picture after post-processing in 3D from our RadMax program. You can clearly see the paleo-channel of the river of small width, which was formed later than the glauconite raft and the water even slightly eroded it. (centered in orange). Most often, amber was not stored in such paleochannels. Apparently, the amber was washed away somewhere downstream of the river. But on the sides of the river bed we see two small lenses, in which the sign of "electromagnetic decompaction" prevails, i.e. the oscillogram of the radar tells us that there is a dielectric rock at this depth. (lenses in the picture are marked with white squares) As it was then verified by excavations at this site, in the lenses there were accumulations (conglomerates) of a fraction of dense amber.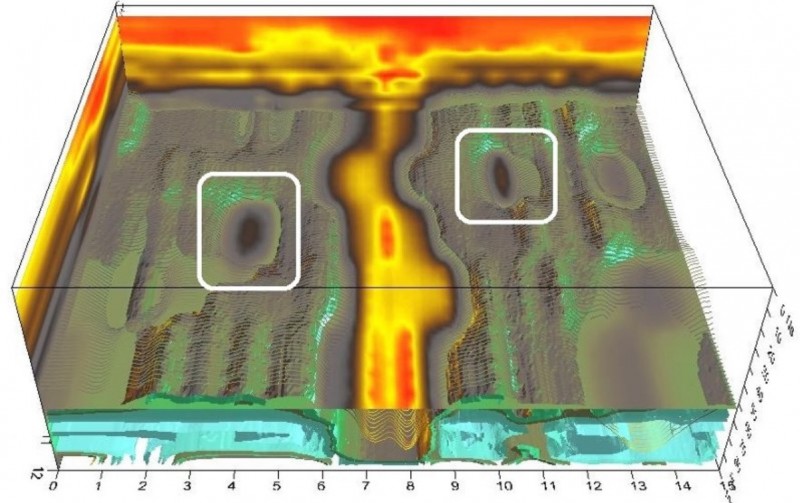
-
Basics Of Ground Penetrating Radar
Alex_Sor replied to Alex_Sor's topic in Detector Prospector Forum
Yes, I agree with you. But ... if you want to use a car, you must know how it drives 🙂 you must know how the engine works in general terms. My goal on this forum is to promote new search methods using GPR. I will not hide the fact that we are selling our radar. But I do not have a goal of "selling at any cost". The radar is very easy to operate, it can be configured and used by anyone who has ever worked with metal detectors. Difficulties arise in visualization. Those. in processing what you see. Our program allows a person to highlight irregularities. Unfortunately, it is impossible to make the radar program itself, automatically, make decisions on identification. We provide training for GPR operators. In this training, we teach how to walk with the radar in the terrain, how to prepare a "path" in the forest for working with the radar, how to assemble the radar, and initial calibration. In our training, we use a polygon, where there are previously buried objects that need to be found. But this is optional. You yourself can make your own polygon, where you can search for objects that you know. The essence of the training is so that you can find objects or traces of human activity (old wells, foundations, caves, etc.) We help remotely those who bought our radar and work with it. This means that you can send us a "profile" (data taken by a georadar over your object). We are not interested in the coordinates of where it was filmed. We help in post-processing and identifying objects or discontinuities. This prevents beginners from feeling thrown into the field. We are always close and in touch. When you learn to work well with the GPR yourself, we will only be needed for new versions of the software 🙂 I am ready to answer your questions here. -
Basics Of Ground Penetrating Radar
Alex_Sor replied to Alex_Sor's topic in Detector Prospector Forum
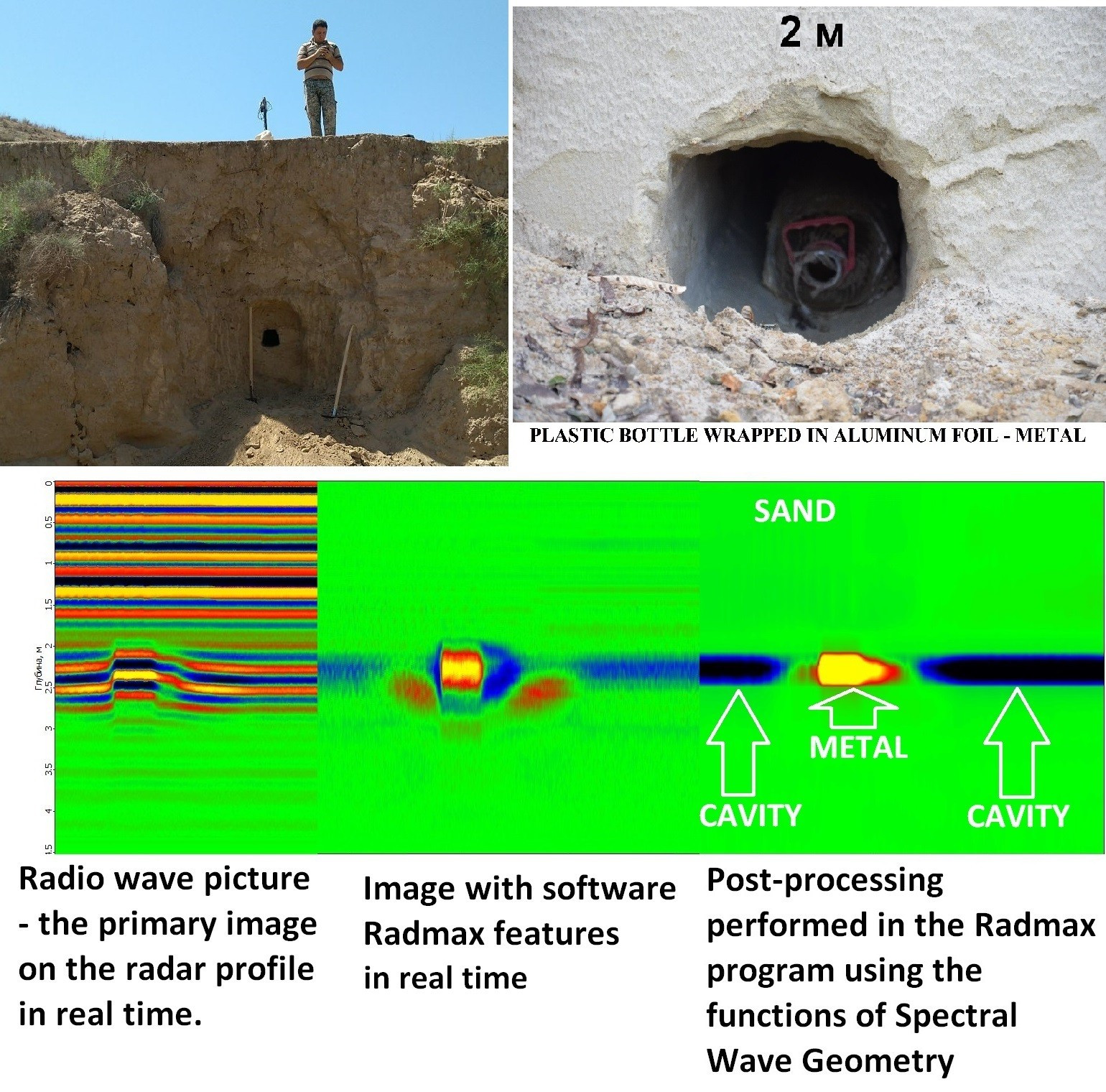
We have a test site where we test radars. Look at the photo. this is a long hole, inside which we placed a plastic bottle wrapped in aluminum foil. As a result of our mathematical processing, the hole itself (voids) and the metal object inside are visible.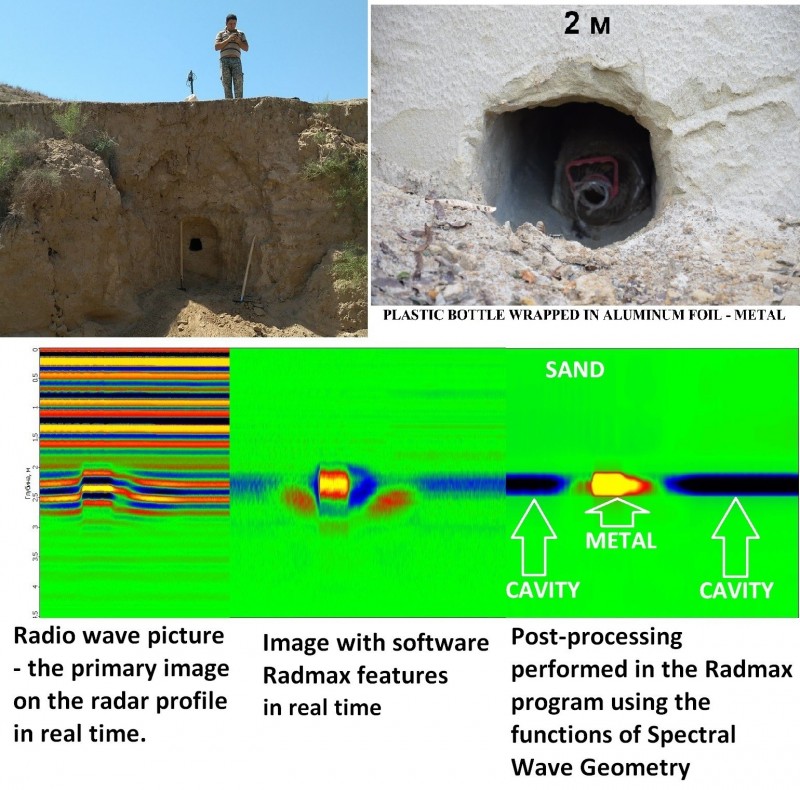
-
Basics Of Ground Penetrating Radar
Alex_Sor replied to Alex_Sor's topic in Detector Prospector Forum
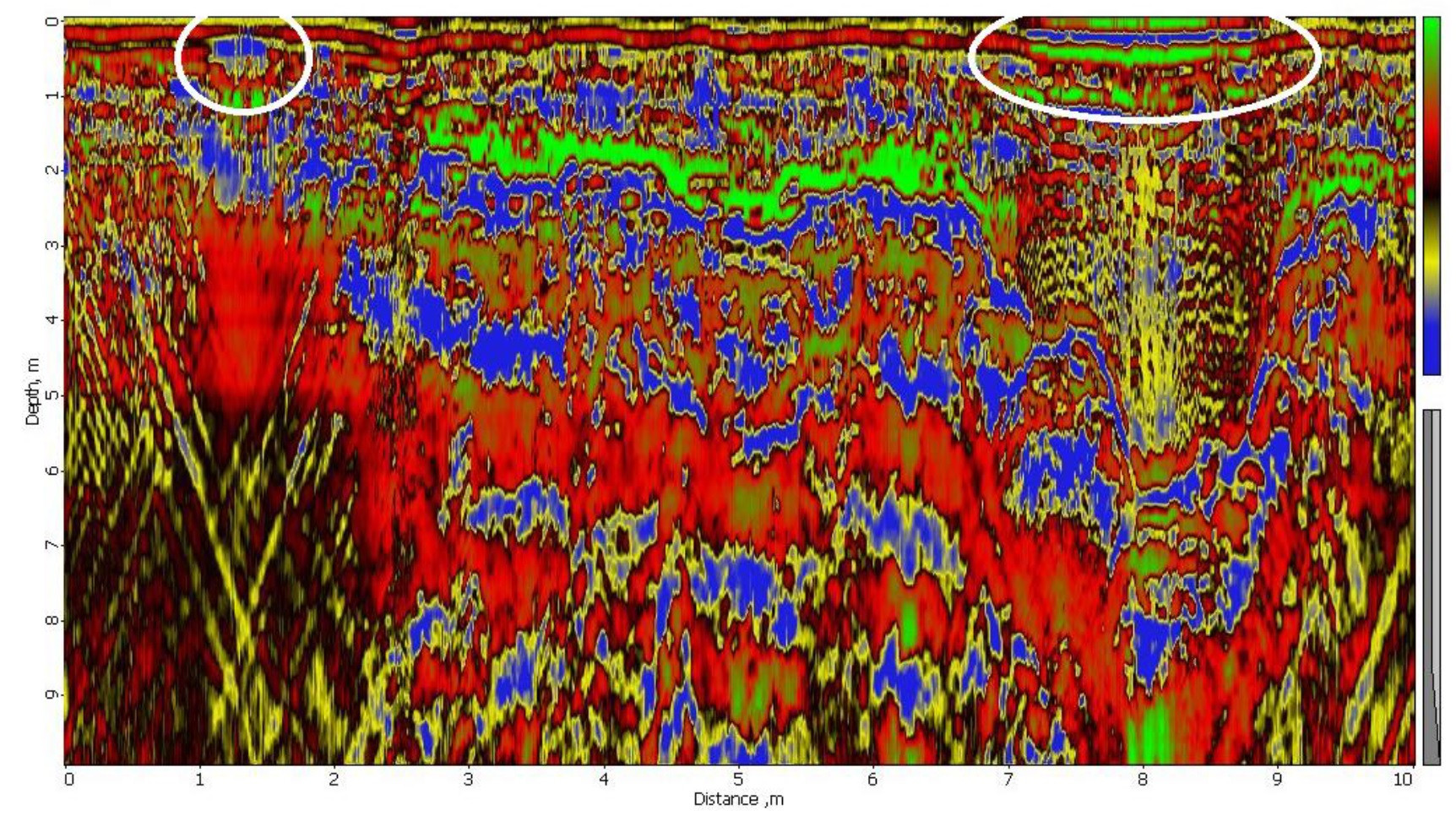
Technogenic (human) objects. in the picture below, a pit filled with earth and a ditch dug and then covered with earth (the radarogram was filmed across the ditch). The pit on the left is surrounded by a white oval, the moat on the right is surrounded by a white oval. The radar allows you to distinguish "mixed land" from untouched land.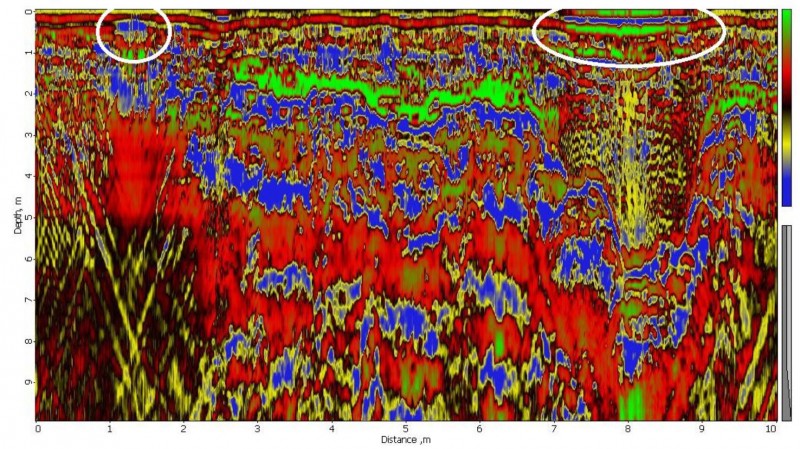
-
Basics Of Ground Penetrating Radar
Alex_Sor replied to Alex_Sor's topic in Detector Prospector Forum
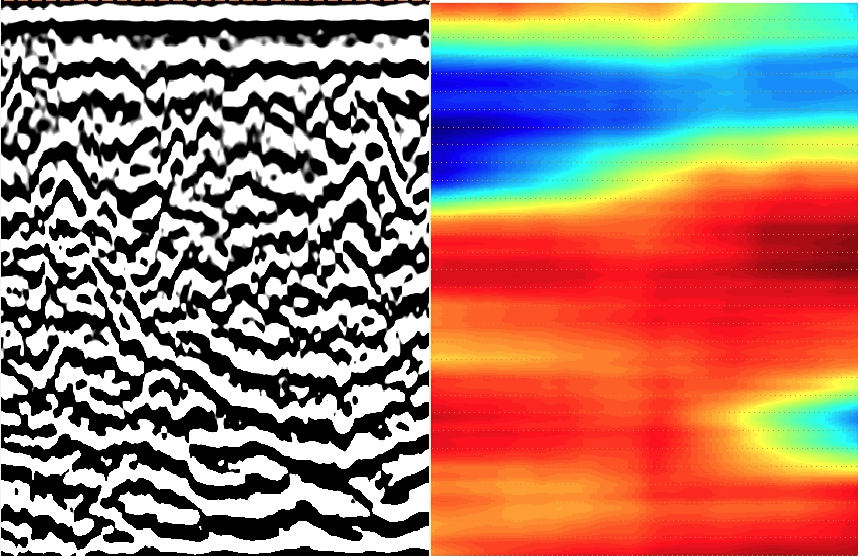
Math can work wonders. Here in the picture on the left is the "primary radar screen". and the second part (on the right) is the result of mathematical processing. The object is visible - it is a cavity-decompaction under the ground (on the right).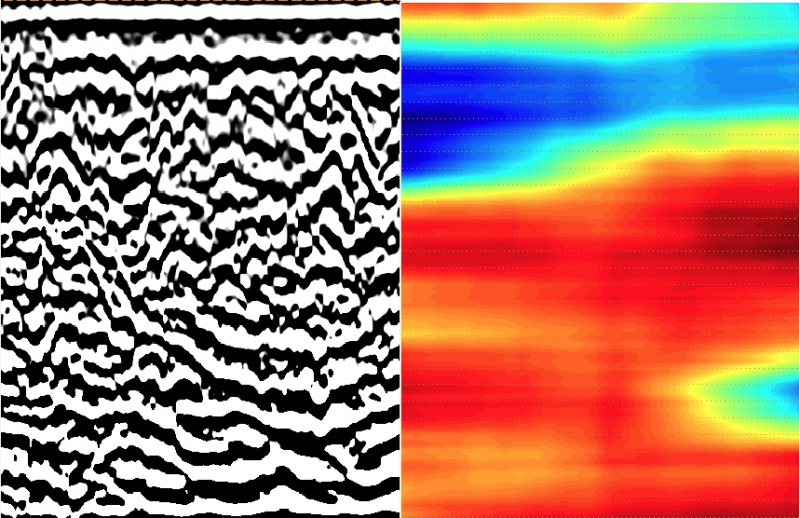
-
Basics Of Ground Penetrating Radar
Alex_Sor replied to Alex_Sor's topic in Detector Prospector Forum
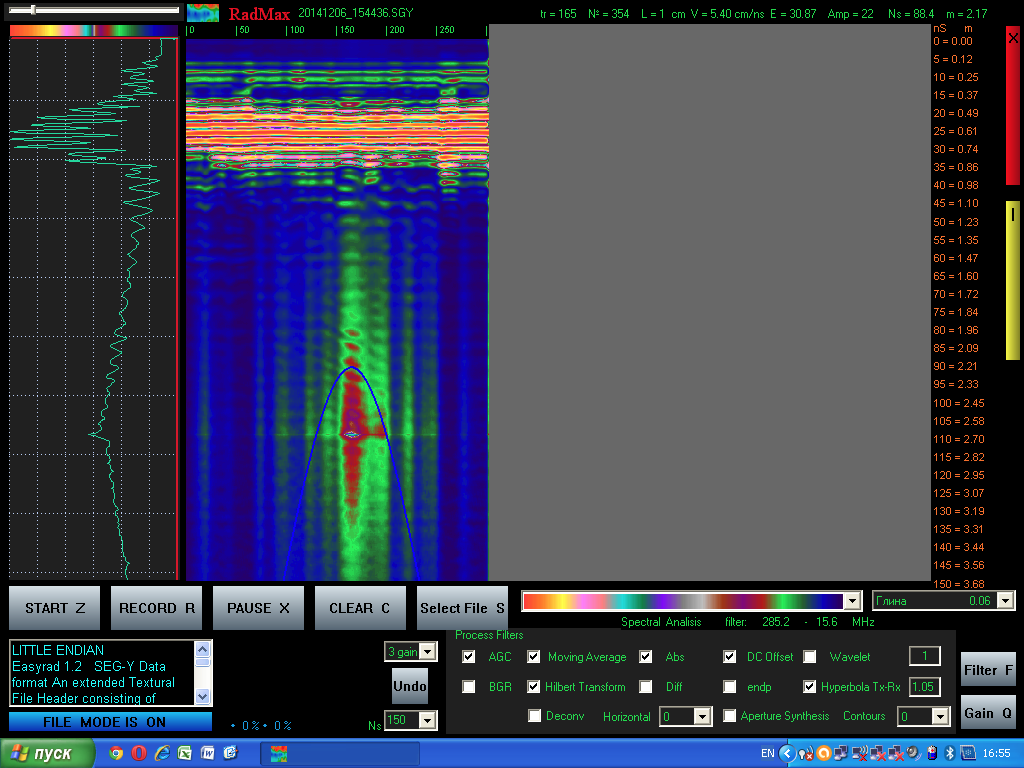
Several examples of work. Archeology. Search for underground passages. The primary readings on the radar profile look like this: Left and right - two pictures with different processing (primary simple processing). On the left, an envelope of the hyperbola is automatically drawn (blue line) over the intended object. Well, now - mathematical processing using our visualization program: Left and right - two pictures with different processing (more complex mathematical filters). Well, in conclusion, this is what the object itself looks like after archaeologists unearthed it: I draw your attention: there is no metal inside the object! Only stones, emptiness (air) and earth rocks (clay).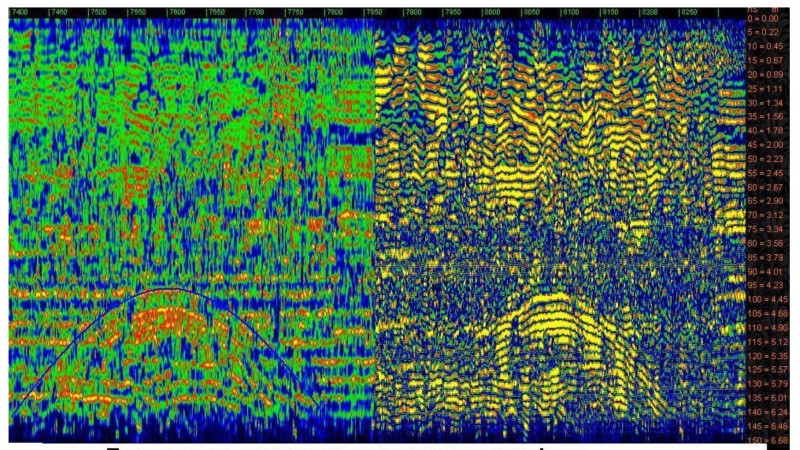

-
Basics Of Ground Penetrating Radar
Alex_Sor replied to Alex_Sor's topic in Detector Prospector Forum
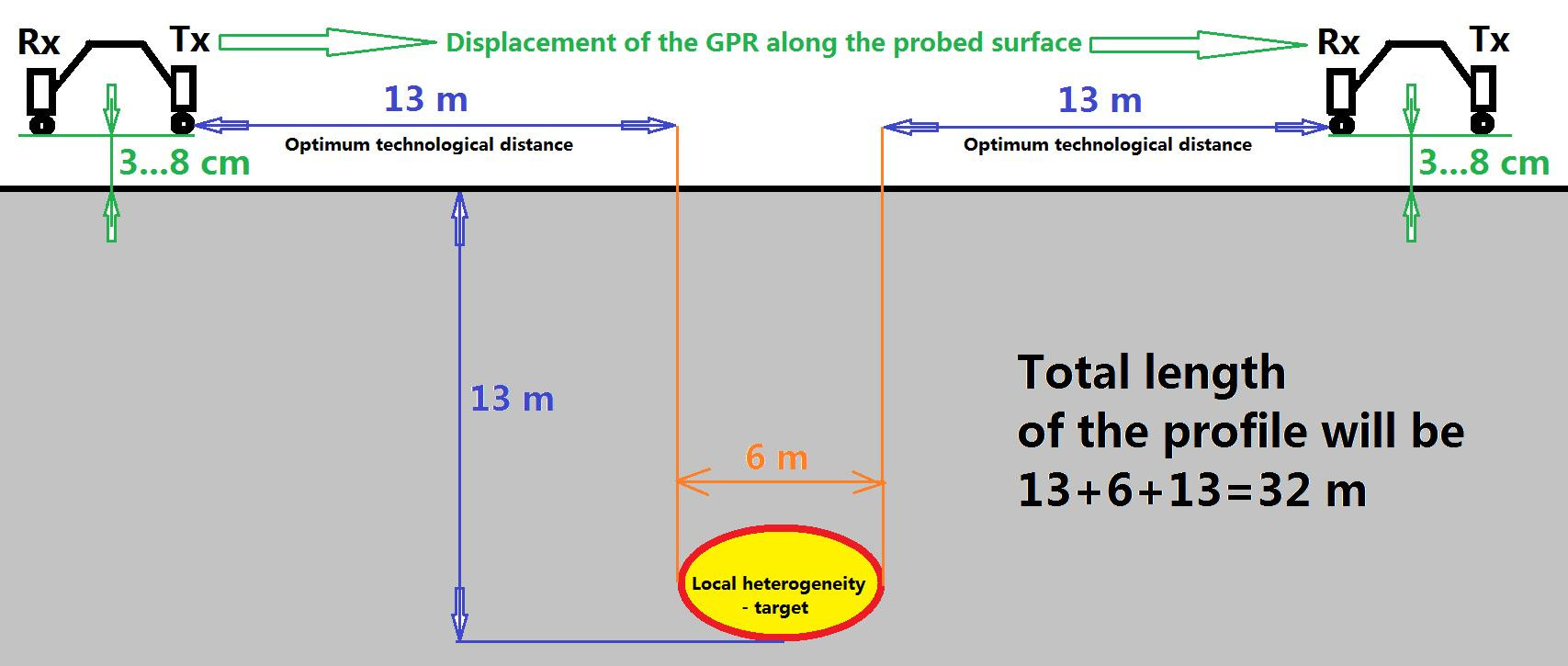
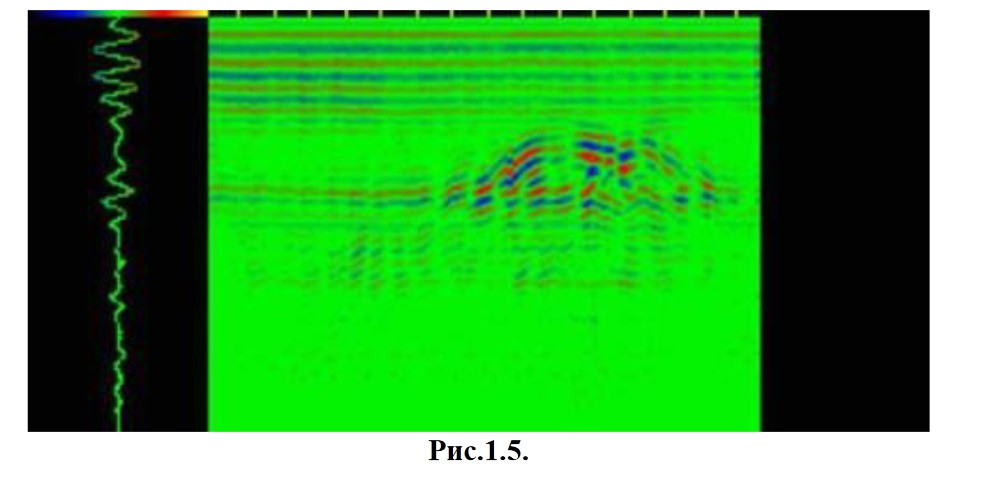
Technique for sounding the GRLPZ. The sounding technique is as follows. The operator moves the device along the surface of the earth along the selected profile, based on the required resolution in the horizontal direction. At each discrete point, a probe signal is emitted, and signals reflected by the inhomogeneities of the subsurface structure are received, which are processed and stored in the computer memory. The main form of presentation of the results is the construction of radar images of soil sections along the profiles of the device movement, in which the depth is plotted along the Y-axis, and the distance in meters along the selected profile along the X-axis. When constructing radar images, special signal processing algorithms are used to display the result on the screen. When displaying an image on a monitor screen, the degree of darkening and the color gamut of image areas corresponding to the inhomogeneities of the subsurface structure is directly proportional to the amplitude of the radar signals reflected from these objects. Since the amplitude of the radar signals reflected from subsurface objects is proportional to the reflection coefficients from the boundaries of these objects, and the reflection coefficients themselves are determined by the degree of difference in the physical properties of these objects from the environment, then in this case we can observe the degree of difference between the observed objects and the environment. The greater the indicated difference (the larger the radar signals), the greater the degree of difference between the image areas corresponding to the indicated objects. Thus, the degree of reflectivity of the boundaries of subsurface objects (for example, the boundaries of layers of different soil) is represented by a color gamut and darkening (blackening) or color saturation of the areas of the picture corresponding to inhomogeneities. Weakly contrasting boundaries of some objects or layers in this case are suppressed by reflections from objects with strongly pronounced differences in their physical properties from the environment. In fig. Figure 1.5 shows the mechanism for the formation of radar images of soil cross-sections using the example of a small section of a profile where reflected signals from two pipelines are observed.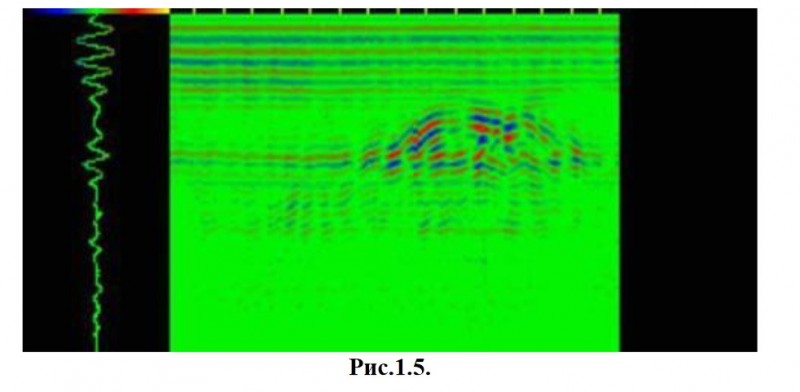
-
Basics Of Ground Penetrating Radar
Alex_Sor replied to Alex_Sor's topic in Detector Prospector Forum
a little fun 🙂 Here in the photo - a man walks with our radar in his hand. Please note, it comes without shoes 🙂 The metal parts of the boots add unnecessary signals to the profile of the shoot, and on this expedition we could not find shoes without metal parts.
-
Basics Of Ground Penetrating Radar
Alex_Sor replied to Alex_Sor's topic in Detector Prospector Forum
The principle of operation of the GPR. The device belongs to the class of monopulse ground-penetrating radars (GRLPZ) of the category of ultra-wideband devices (UWB) and is one of the tools for sounding the soil structure to a depth of several tens of meters in order to detect and determine the spatial boundaries of the occurrence of various subsurface inhomogeneities (objects that differ from the surrounding environment electrical characteristics: dielectric constant and conductivity, for example, areas of high humidity, soil decompaction - voids, inclusions of less / more dense substance, etc.). The principle of operation of the GRLPZ is based on sensing the physical environment with electromagnetic pulses with an amplitude of 5-10 KV and a duration of about 2-8 nanoseconds and recording the amplitude and time delay of reflected signals from the interfaces between media with different dielectric permittivities. The GRLPZ is capable of sounding the ground to a depth of 15 (30-50, Pro version) meters. The sounding signal emitted by the GRLPZ antenna propagates under the earth's surface, attenuating as it propagates, and, encountering an inhomogeneity, is partially reflected in different directions, including in the direction of the receiving antenna. The level of received signals depends on the reflection coefficient of the signal from the subsurface heterogeneity. The reflection coefficient depends on how much the electrical parameters of the inhomogeneities differ from the parameters of the environment. The larger the difference, the larger the reflected signal. Part of the signal goes further and is reflected from the next discontinuity, etc., until the signal is completely attenuated. The GRLPZ can be equipped with various types of antennas for solving various problems. Dipole antennas are the simplest in a low-budget configuration. As a radiating system for professionals, a specialized antenna (option, version -Pro) has been developed, which has less radiation into the upper half-space and lowered lobes of the radiation pattern along the earth's surface. The antenna is based on a magnetic slot antenna based on an open resonator structure. The directional pattern of the GRLPZ antenna has a width not exceeding 25 degrees. The use of this type of probing signal made it possible to relatively easily apply methods that lead to a gain in the signal-to-noise ratio and, ultimately, achieve a much greater sounding depth. The radar software allows us to visualize a picture of what is below us. It is possible to build a 3D picture. For example, here is a 3D picture of a river bed: