


UKD2User
-
Posts
126 -
Joined
-
Last visited
Content Type
Forums
Detector Prospector Home
Detector Database
Downloads
Posts posted by UKD2User
-
-
On 1/22/2024 at 5:05 PM, Lodge Scent said:
Raziel, I will sometimes use negative disc when I am after very deep targets or really what I mean is when I am after good targets with very weak signals. At the edge of detection, nonferrous targets can begin to sound like iron. I don’t want to disc out those very weak signals. I suppose setting disc to “0” would serve my purposes, but with my very mild soils, I can drop it down to -6.4 with no additional negative consequences that I can notice.
So yes, in some circumstances I find that negative disc can both get me more relative depth and prevent masking.
Lodge
Completely agree. What is less obvious is that lower recovery speeds can tend to make a good target sound more like iron than higher recovery speeds - all other things being equal - especially in mineralized ground. Of course, the trade-off with a higher recovery speed is a loss of depth (which is less marked in mineralized ground than in clean ground). Based on the above, you may benefit from a lower disc setting if using a lower reactivity in the hope of more depth.
-
12 hours ago, Tom Slick said:
The lower the frequency the higher the battery consumption.
Absolutely. Ohmic losses (simply warming up the coil!) are greater at lower frequencies.
-
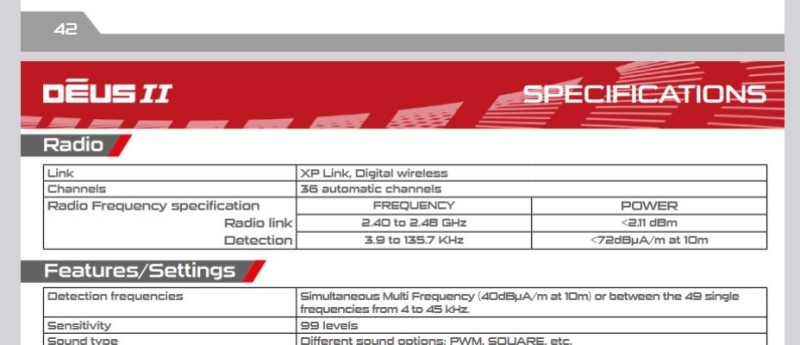
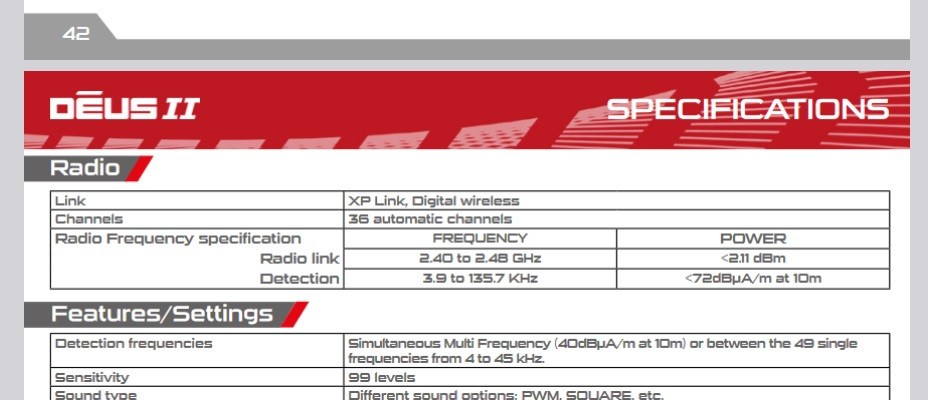
I think it's really important to understand that all D2 search modes, including 'Deus Mono' transmit a set of frequencies into the ground. The transmit waveform in all cases is a pulse-train with square-edged pulses. All such pulses contain a set of frequencies ('harmonics') - most strongly at three times the pulse repetition rate and less strongly at five times the pulse repetition rate (the third and fifth harmonics). I attach a snapshot from page 43 of the manual which shows that the maximum frequency used for detection is declared to be 135.7 kHz - which divided by three is 45.23 kHz - acknowledging that there is (at least) a third harmonic component in the signal transmitted.
If you select 45 kHz in Deus Mono mode, you are also transmitting at 135 kHz simultaneously - whatever you do.
How the machine chooses to make sense of the return signal is a trade secret - there are some clues in the manual ('subtractive' vs 'additive' algorithms - presumably adding or subtracting results in different frequency bands). I think it's a given that the D2 will analyze the return signal using exactly the same type of (DFT) algorithm as used to produce the spectrogram in the video - to give target/response info across different frequencies. Only XP know how the D2 processes the return signal in 'Deus Mono' mode, but I would guess that it uses a D2 not a D1 algorithm (to give more reliable TID at depth etc that is obtained by examining the response across multiple frequencies).
I don't think that underwater you need to worry about EMI, so SMF is the way to go in all cases.
I think that the effectiveness of a 'noise cancel' is limited when the EMI is evenly smeared out across the frequency spectrum (broadband noise vs narrowband noise). Modern EMI sources like cellphones tend to generate broader spectrum noise, making them less easy to eliminate. Clever digital signal processing algorithms - making use of correlation between the transmitted and the received signal - can go an amazingly long way to eliminate the effects of even broadband noise.
PS the video also shows the 'noise floor' in that indoor environment!
-
Another excellent video. I believe that the presenter is an XP engineer. It's been available in French for a while, but it's nice to have an English version, just to make sure what's actually being said!! 🤔😁
I see that Gary's videos are sometimes translated into French...
-
On 1/13/2024 at 4:28 AM, Tony said:
I wonder if the Manticore battery is the same as the Equinox ??
No, it has a larger energy capacity and a different form factor (than the EQX 6/800 battery at least). MC = 25Wh and EQX6/800 = 18.5Wh
-
While on the subject of Ground Stabilizer, and returning to the topic of 'ground shocks', as the D2 manual describes them, I wonder if people have been hearing physical impacts on the coil by, for example, stubble, because they have Ground Stab set at a value of 1, instead of the more usual 2. Reading the manual, it becomes very clear that when the machine is sailing close to the wind (ground), with GS = 1, the possiblity of noise from coil shocks/impacts is increased.
-
1 hour ago, F350Platinum said:
I hope I'm not misunderstanding your question for Jeff above and hope he will answer.
I've had the 13x11 coil since it first came to the USA, I was literally one of the first to use it. I bought the 11" while waiting, didn't like it much then, and honestly save for it being a blessing while recovering from a shoulder dislocation, I still don't like the 11". It allowed me to stay out there longer and stays a bit more rigid on the SteveG shaft coil yoke, but that's where it ends.
Who knows, I may have bought a defective 11", it finds stuff just fine and is slightly more accurate locating a target, but it is characteristically not as good as the 13x11".
I can say with almost complete certainty that the 11" gives false high tones on iron far more than the 13x11. I will also assert that the 13x11 separates targets much better than the 11". I'm not a scientist so I can't tell you why. Again it could be that I have a defective 11" coil, but I'm seeing this posted more lately now that others have invested in the 13x11.
Depending upon how I have audio response adjusted, I've hit US dimes (17.91mm) at depths that seem ridiculous for a VLF, 5 scoops or more on the beach which is about as deep as I want to dig. In the field my 11" long Ranger digger takes a big plug out, and I've found them in the bottom of the hole.
If I recall posts from engineers regarding coil size and shape with respect to depth, I believe there is a "sweet spot" in coil size and shape where depth is at maximum and my results in the field and beach tell me that other than the Xtrem Hunter, XP isn't going to give us another coil. 🤣
Were I to do it all over, I'd have just the 9" and the 13x11", I'm keeping the 11" as a backup if I forget to charge the larger coil and often bring it with me on another lower to use if I get tired. At US $400 each no matter the size, the 13x11 is the best value for the money if you already have the 9".
This mirrors my experience of owning all three coils - the 9" and the 13" are the two I actually use, with the 11" as a backup/spare.
-
It's very good to see some objectivity supporting what I already intuitively 'know' - or perhaps you could just call it 'confirmation bias' (😁!). I installed V2.0 as soon as it was available and would not go back to any other version.
I seem to remember reading Tom Dankowski, on his forum, suggesting - in a completely different context - that a certain amount of 'bump sensitivity' is a good thing. I guess because it shows that the machine is working to the best of its capability.
-
16 hours ago, fishersari said:
Recovery speed of 6 and no stabilizer for me..
I should took a video for the audio responds on all directions and my wording doesnt help much either 😁.
its was a cannonball at 4 to 6 inches deep.. Does your 2D screen shows the traces at the same spot as mine for a cannonball?

Truffles ??!! 😁👍
-
54 minutes ago, raziel900 said:
i don't understand, where is it written that v2 improves other things besides goldfield? the official changelog is clear it only modifies goldfield prog, what would these other improvements be?
New features added, I seem to remember - also the WS6 was given almost all the features of the remote, except XY screen and multi-program saving.
V2 also fixed some of the 'fixes' in the earlier V1.XX !!
-
1 hour ago, Rattlehead said:
Interesting. I've been wanting to do a complete CF shaft on my Deus 2. I already have the lower shaft from Detect ED.
A few questions for you, if you don't mind:
Is this the middle shaft section you used?
https://www.noktadetectors.com/accessory/middle-shaft-carbon-fiber/
If so, did you just have to drill the holes to mount the remote? Is it the same length as the D2 middle shaft? No issues going through the D2 handle?
On the other end, the part where the lower shaft inserts, did you use the Nokta clamp to hold the Detect ED lower, or drill it to accept the OEM Deus clamp?
Thanks!
That is the middle section I used (I actually bought it from Detect-Ed at the same time).
I didn't drill holes in the top end, I simply used a dab of polyeurethane gorilla glue to hold a replacement XP clip in the top end of the tube.
I kept the Nokta camlock at the bottom end - it is a little larger than the XP equivalent (and a teensy bit heavier!) - mainly because I'm not sure if the XP camlock requires the same cutout in the tube (I couldn't be bothered to check!) - it works just fine.
I actually use this rig with the Lite stem - overall it's a couple of pounds lighter than the Manticore (both with an 11").
-
It's not just the lightness of carbon which is so good but also the, erm, stiffness...... 🤐😀
-
I got two Detect-Ed stems for my 13" and my 11" and I relegated the XP 'CF' stem that came with the 13" to the 9" coil.
I love the Detect-Ed stems, but didn't feel I could justify the extra cost of a third!
I also replaced the upper section of the stem with the carbon fibre/er stem from Nokta, designed for the Legend/Simplex - it fits perfectly.
-
-
14 hours ago, CPT_GhostLight said:
..... too dislke being a pack-mule for iron, unless it's something interesting of course, but most of the iron I dig, I know it's iron before I dig it. Where I find pinpointer discrimination most useful is in old nail and iron polluted relic sites when trying to fish a small non-ferrous target out of the sea of ferrous items. 😉
A trick that was popularised by Gary B, and is used by at least one YT D2/MI user, is to glue a small disc magnet with epoxy or similar onto the end cap - a good way to discriminate/eliminate stray iron in the hole. My D2 continues to surprise me by the way I often find several nails etc in the hole with a nice non-ferrous item.
-
18 hours ago, Geotech said:
Internally, there is no difference. Notch is just a narrow band of discrimination, and all discrimination is based on target phase...
And magnitude of course (it's a vector, not scalar, quantity).
-
1 hour ago, iron_buzz said:
Yes, Iron audio can be reduced to zero. But while I apprecite you taking the time to type out a thoughful reply, you are talking about how to use each. I'm asking about the internal differences, not the functional/practical ones. What, to a metal detector engineer or programmer is the difference?
The truth is, nobody (outside those who need to know) knows - because the code is proprietary, and is protected by encryption. There is clearly processing which creates a sound-based representation of a target, and separate (but obviously closely related) processing to generate as reliable a visual TID as possible. These processes may well go on in parallel, although the visual TID seems to be time-averaged, and therefore, later than the audible representation.
Notching and disc are both, on the face of it, processes which require a TID, of some kind - probably not the same as the one displayed visually - to have been calculated first - but I'm sure it's more complicated than that!
-
The number 25 is just a number. It represents a factor by which target signals will be 'corrected' to take account of the fact that the ground has some magnetic/conductive properties due to mineralization.
Loren Lemke gives a really good explanation of this from around the 20th minute of his YT video:
-
On 10/29/2023 at 1:06 AM, iron_buzz said:
I don't understand what makes Deep HC any deeper or better for high conductors than any of the other programs if you drop max frequency and reactivity. Is there maybe some internal difference that they don't tell us about?
There is an externally identifiable difference - the transmit waveform is different - it's stepped and looks like a very crude triangle wave (which will have different harmonics). There are almost certainly differences in the way the return signal is analyzed but these will most likely remain trade secrets (unless the encryption can be broken). Most other modes use a transmitted signal which is essentially a repeating square wave with two alternating duty cycles. The HC transmitted waveform requires more battery power (because it has more low frequency energy and the coil suffers greater resistive losses) - the Manticore does something similar, and this is the origin of their 'more power into the ground' marketing guff.
-
On 10/29/2023 at 7:52 PM, Geotech said:
"All single frequency, multifrequency, and PI designs use accumulation. "
I'd be fascinated to know how you know this, given the level of encryption protecting most embedded code in modern detectors - have you seen the source code or reverse-engineered one/several?
Yes, I'm sure that target responses at multiple frequencies are compared/correlated in various ways, but 'accumulation' (if it means anything very much) suggests simple addition. We know that the D2 , for example, uses more than one kind of addition and/or subtraction in processing the return signal - there are almost certainly other transformations going on.
The great beauty of processing signals digitally is that you can do all sorts of things with them - in the time domain and/or the frequency domain.
-
22 hours ago, Digalicious said:
...... it seems to me that since most of the EMI noise has a "signature" identical to good targets, then the algorithm would often throw out the EMI signals, along with the wanted signals.
I don't think it's possible to say that most of the EMI mimics the "signature" of a good target - a little will, most won't, I'd argue. By its nature EMI is unpredictable. The response signal from a target is very strongly correlated with the (precisely known) transmitted signal - but (almost by definition) uncorrelated with extraneous EMI. 👍
-
13 minutes ago, Digalicious said:
About a year ago, I read a post in which a metal detecting engineer was explaining why SMF is so much more suspectable to EMI than SF. It went something like this:
With SMF, multiple samples (frequencies), get accumulated during the processing. Therefore, the EMI noise also gets accumulated accordingly.
I think the bottom line, and most important aspect of EMI, is that a metal detector does not, and cannot, know if a signal is coming from the air, or coming from a target in the ground. As such, there is no true way of mitigating the EMI, without a performance loss in one way or another. For example:
EMI signals are typically weak, and that of course, is why reducing the gain on the amp, mitigates the EMI, but that means depth loss. Switching to a SF that is outside the range of the EMI is another option, but then the benefits of SMF are gone.
The difference in the channel frequencies is very small. Something on the order of a mere 0.02 khz difference between the channels. That's just too small of a shift to mitigate the various frequencies, harmonics, and random nature of EMI. Further to that, a frequency shift doesn't address the fundamental problem of noise when using SMF. That is, the exponential rise in noise due to SMF accumulating the EMI noise. Of course, it all depends on the nature of the noise - its 'spectral power density'.I think it's more subtle than that - analysing the return signal over a range of frequencies (what we know as SMF) ought (other things being equal) to give an opportunity to reduce the overall effect of noise (EMI and/or mineralization) through clever signal processing e.g. some kind of (auto-) correlation process, on the basis that interference will not affect all frequencies equally at any given time. Of course, a lot depends on the nature of the noise - its 'spectral power density'.
-
5 hours ago, Shelton said:
Okay next thing EMI cancel feature with Deus II is only a random channel selection. The software does not analyze anything, it just selects a random channel. If the choice is bad, press again, and maybe you'll be lucky this time... Of course with the other devices you have the same problem. Only Manticore working in a different way.
How do you know this? My impression is that the Manticore just lets you cycle through the available wavebands continuously over a longer period (and combines the results in some way that they do not give detail on). My impression is that the D2 and the Equinoxes (and probably others like the Legend) are not random, but only sample each possible waveband once during a given 'noise cancel' session.
-
I have found that a good way to reduce the audible effect of EMI is to reduce Audio Response, followed by reducing Sensitivity (or Salt Sens first if using Beach modes)

Full Tones And Negative Disc -6.4
in XP Deus II Forum
Posted
Newsflash - every post on the internet = opinion 😉😁
To be fair to me (whoever I am!) I have some supporting logic/evidence for my 'opinion':
1) Paystreak's video below (in what I think is quite strongly mineralized ground).
2) From first principles -
a) If you keep swing speed (and all other things) the same, a higher recovery speed means that the machine is analysing a smaller volume of ground - to come up with a determination - than it is at a lower recovery speed. This stands to reason (!) and is consistent with the diagrams/descriptions in XP (and Minelab, and no doubt others) manuals - although these show a discrete (e.g. nail), rather than diffuse (e.g. black sand) iron 'masker'.
b) All detectors have to work very hard to see a non-ferrous 'needle' in a ground 'haystack'. The return from even benign, un-polluted, soil is very large compared to the return from a deep and/or masked non-ferrous target. Searching a smaller volume of soil (using a smaller coil, for example, or as in this case, using a higher reactivity) improves the chances of finding a non-ferrous target in that 'swept volume'.